Abstract
Most of us take our navigation abilities for granted and instinctively use our sense of sight to help us find our way. However, for millions of people worldwide with visual impairments, wayfinding and navigation are a daily challenge. Pedestrians with visual impairments lack basic information about the spaces in which they are walking. This restricts and limits them, makes them dependent on others, harms their welfare, and negatively impacts them socially. Recently, a study was performed at the Technion in Israel, aimed at developing software and an application to design walking routes especially suited for the visually impaired population, focusing on their unique needs and preferences. This study offers an effective and practical solution for pedestrians who are visually impaired, which enhances their mobility, independence, and welfare, and thus enables them to engage more easily with society.
Spatial Orientation and Visual Impairments
There are more than 1.3 billion visually impaired people in the world today, more than 40 million of whom are blind, and these numbers are expected to grow in the coming years. Most sighted pedestrians will choose the shortest walking route, using their inborn wayfinding and navigation skills. These skills rely on environmental knowledge derived from their familiarity with and perception of the space they are in, which is known as spatial cognition [1]. The process of spatial orientation, which is our natural skill that enables us to go from place to place, is made possible by special brain cells that construct a kind of a mental map [2], and this process is essential when navigating on foot. Because the spatial orientation process is based mainly on our sense of sight and relies on things we see, such as landmarks along the route, pedestrians with visual impairments cannot develop a similar ability [3]. It is also difficult for them to deal with physical obstacles and hazards, such as cracks in the pavement, benches on the sidewalk, and areas shared by other road users, such as cyclists and car drivers [4].
Spatial orientation and navigation are complex, often dangerous tasks for visually impaired pedestrians, and they are more likely to experience falls and injuries [5]. As a result, some visually impaired people are reluctant to walk alone on unfamiliar routes, which reduces their mobility, impairs their independence, confines them to their homes, and negatively affects their wellbeing. Despite the development of assistive technologies that can detect and classify obstacles1 and read the text of signs2, there is currently no technological solution to provide visually impaired pedestrians with information about the spaces they are in and guide them to safe and accessible routes suited to their needs and preferences.
Planning Routes for Visually Impaired Pedestrians
Available navigation applications, like Google Maps and Apple Maps, are not helpful for people with visual impairments, so the development of a customized, accessible application is needed. At the Technion—Israel Institute of Technology, we are looking into the use of an open-source digital map service called OpenStreetMap (OSM)3, to develop route planning software that can plan optimal walking routes for pedestrians with visual impairments. OSM is an online map project based on the idea of crowdsourcing, in which the map is created using geographical data collected from a large group of citizens all over the world. As part of this project, anyone from any country can add map details, such as roads, buildings, bus stops, vegetation and more [6] (for example, the Pokémon Go application is based on OSM maps). OSM makes it possible to store map details that are not available on other maps (such as Google Maps). These details include information about accessibility at pedestrian crossings and traffic signals—information that directly affects the planning of an optimal route for visually impaired individuals that should be safe and accessible. To calculate such a route, an optimization process is required. Map details like accessibility and road safety are prioritized, while hazardous map details such as high-risk intersections and routes that are also used by cars are avoided. To develop the software, we went through several research stages.
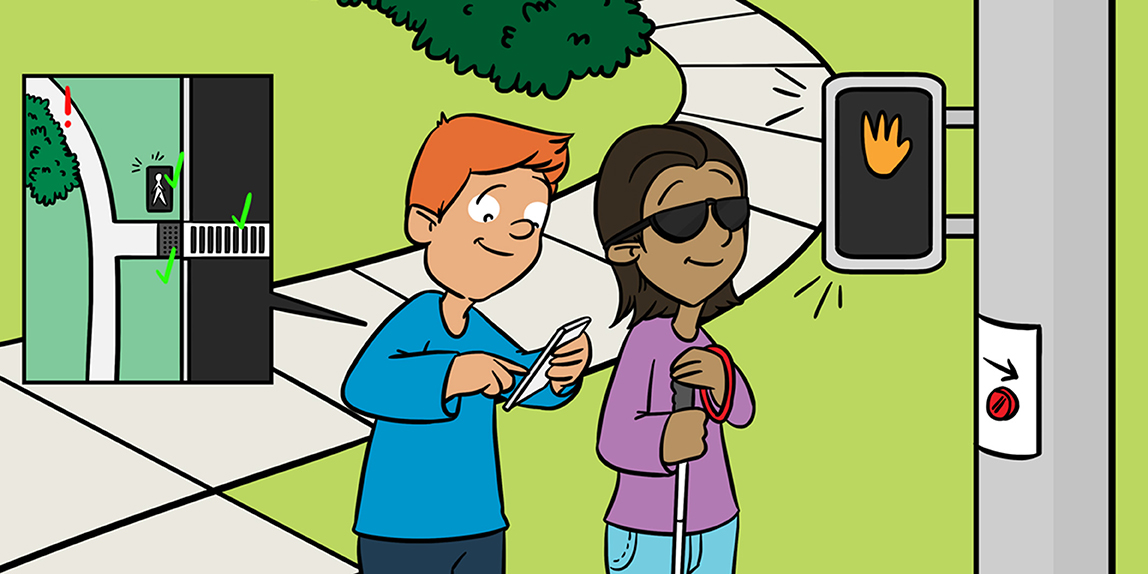
First, we interviewed and observed pedestrians with visual impairments and rehabilitation professionals from a multi-service center engaged in functional and social rehabilitation of people with blindness or visual impairment called Migdal Or4 (Figure 1) to study the factors and conditions that make a route accessible and safe. We focused on understanding the dangers and limitations that visually impaired pedestrians face in urban environments, and which methods can help them improve their ability to safely orient themselves and navigate.

- Figure 1 - To develop an application to assist the navigation of visually impaired pedestrians, we first observed users and rehabilitation professionals as they traveled along various routes (Photograph credits: Migdal or Association).
Second, we developed of a set of rules that defines an optimal route, based on the data and findings that emerged from the interviews and observations. These rules include:
- Straight routes are better than routes that have many turns.
- Landmarks such as traffic lights, lampposts, and bus stops can help visually impaired pedestrians navigate and orient along the planned route.
- Assistive technological devices located at intersections and pedestrian crossings, including vibrations or sounds indicating when to cross or pavement with a unique texture, are important ways to assist the visually impaired (Figure 2).
- There are specific types of assistive and safe routes, such as sidewalks, and there are routes that are more hazardous and difficult, such as dirt paths or roadways used by motor vehicles. Route quality is also important—for example, potholes and cracks in the pavement are hazardous.
- Hazards or obstacles that may impede safe walking should be avoided, including parked cars, posts, or benches on the sidewalk. Parks or plazas without orderly paths make wayfinding difficult.
- The safety and accessibility of intersections for visually impaired pedestrians varies, and priority should be given to intersections with safe street crossings that include traffic lights, while intersections that branch out into different roads or have traffic islands should be avoided.
- Priority is given to shorter routes.

- Figure 2 - (A) Tactile pavement on and before a pedestrian crossing.
- (B) An accessibility device that provides crossing information. These assistive devices make it easier for visually impaired pedestrians to navigate street crossings (Photograph credit: Wikimedia).
Then, using these rules, each section in the road network is given a score either facilitating (sidewalk or crossing with assistive technology, for example) or hindering (shared road or potholes, for example). The software calculates the scores for the various route sections, to find the route with the lowest overall score. The lowest-scoring route represents the best route among all the possible routes between the starting point and the destination.
Calculating Routes on the Technion Campus
The testing area for our study was the Technion campus in Haifa, Israel. The campus’s mapping data was entered into the OSM map to obtain a comprehensive and up-to-date picture of the entire environment. The starting point was the main entrance to the Technion campus, and destination was the student dormitories. Figure 3A shows three optional routes calculated by the route-planning engine, noting the total length for each route and the final score it received.
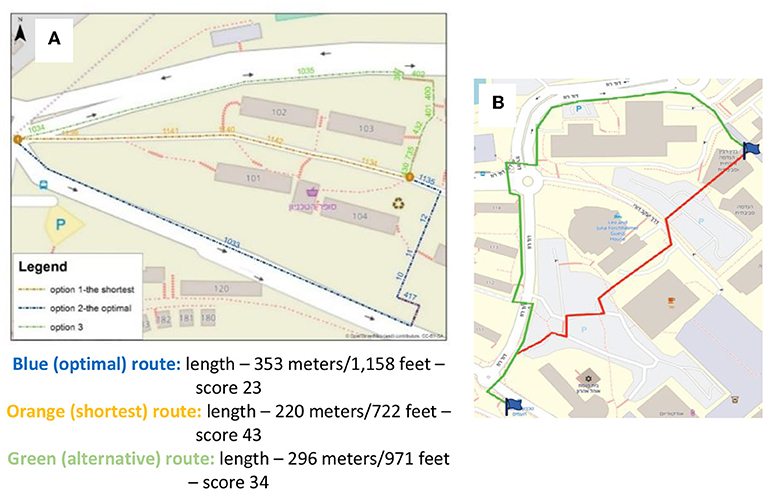
- Figure 3 - (A) Three alternative routes from the Technion campus’s main entrance to the student dormitories.
- The blue route is the optimal route, with the lowest score (23). The orange route is the shortest route, but has a much higher score (43). (B) Two alternative routes from the campus’s main bus stop and the Faculty of Civil and Environmental Engineering building. The green route is the optimal route, with the lowest score. The red route is the shortest route, but has a higher score (Background image credits: OpenStreetMap).
While the orange route is the shortest one, it is very dangerous for pedestrians with visual impairments because it does not have a sidewalk and it goes through a service road that is also used by motor vehicles. The optimal route, the blue one, maintains a clear direction following the road, has landmarks along its length, and consists solely of sidewalks that are safe for walking. When we asked a rehabilitative professional to plan a route between our starting and ending points for a visually impaired pedestrian, the professional chose a route that was identical to the optimal route calculated by our software. In addition, a visually impaired pedestrian who was asked to try out two of the routes reported that the optimal route calculated by the software was easier and more convenient to use. He also thought that the optimal route was shorter, although it was actually longer than the shortest route.
Figure 3B shows another example of a route calculated between the campus’s main bus stop and the Faculty of Civil and Environmental Engineering building. This time, the system chose the green route as the optimal one. Unlike the red route, which is the shortest, the optimal green route avoids intersections without safe pedestrian crossings and avoids walking in car parking areas, which are very dangerous for visually impaired pedestrians.
Insights From the Study
Pedestrians with visual impairments must apply unique orientation and navigation skills, using non-visual information about the environment. This is a considerable challenge. The research we are conducting suggests that we can help visually impaired people overcome these navigation difficulties by using open-source mapping data combined with a system of rules to create optimal walking routes. The results of the experiments carried out on the Technion campus indicate that the optimal routes calculated by the software were safer and more accessible than shorter routes and were identical to routes planned by rehabilitative professionals. The findings and tools developed during the study have the potential to improve the wellbeing of visually impaired pedestrians. The insights gained from the study can be adapted to help other populations, such as wheelchair users. The proposed solutions can be included in urban planning, which can ensure the design of accessible cities that consider the needs of special populations with various disabilities.
You Too Can Help!
For the route-planning software to work reliably and serve visually impaired pedestrians who will be using the application, it must have a complete and up-to-date map. Anyone can update and add missing data to the OSM project. You can contribute by mapping the area where you live. Mapping and updating the sidewalks and pedestrian crossings will significantly improve the software’s abilities and reliability, and will contribute a great deal to this important social effort (see Box 1). Good luck!
Box 1 - Learn more and contribute!
To try out the route-planning software developed in the study (it currently plans routes only in Israel but will soon work in other countries too), click here
To see a video describing the study, click here
For a citizen science project in school—Landmarks for an Accessible Environment, click here
For the mobile application developed in the Technion—Israel Institute of Technology, Haifa, Israel, for mapping relevant data in the OSM map (beta version), click here
To enter mapping data in the OSM map, click here
Glossary
Spatial Cognition: ↑ What we know and believe about the spatial properties of the world. Studying our environment enables us to identify where we are in a space and to use navigation options.
Spatial Orientation: ↑ A skill that enables us to go from place to place, including the ability to plan an effective route between two locations, locate landmarks, and identify destinations.
Landmarks: ↑ Natural or human-made objects that are easily recognizable and can be identified along a route. Examples include a mountain, an interesting building, or tower.
Open Source: ↑ A method of software development that encourages collaboration and is freely available to anyone in the public for observation, modification, and improvement.
Crowdsourcing: ↑ A method for performing a task usually done by professionals, with the help of a large group of people who are not experts.
Optimization: ↑ A mathematical process that makes it possible to choose the optimal or best solution from among a set of possible alternatives, according to defined criteria and rules.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Footnotes
1. ↑ http://www.senderogroup.com/
2. ↑ https://www.orcam.com/en/myeye2/
3. ↑ https://www.openstreetmap.org
4. ↑ https://www.migdalor.org.il/
Original Source Article
↑Cohen, A., and Dalyot, S. 2020. Route planning for blind pedestrians using OpenStreetMap. Environ. Plan. B Urban Anal. City Sci. 48:2399808320933907. doi: 10.1177/2399808320933907
References
[1] ↑ Montello, D. R. 2005. “Navigation,” in The Cambridge Handbook of Visuospatial Thinking, eds P. Shah and A. Miyake (New York, NY: Cambridge University Press). p. 257–94. doi: 10.1017/CBO9780511610448.008
[2] ↑ Derdikman, D. 2020. How does the brain know where we are? Front. Young Minds. 8:59. doi: 10.3389/frym.2020.00059
[3] ↑ Fernandes, H., Costa, P., Filipe, V., Paredes, H., and Barroso, J. 2017. A review of assistive spatial orientation and navigation technologies for the visually impaired. Univers. Access Inf. Soc. 18:155–68. doi: 10.1007/s10209-017-0570-8
[4] ↑ Yang, R., Park, S., Mishra, S. R., Hong, Z., Newsom, C., Joo, H., et al. 2011. “Supporting spatial awareness and independent way finding for pedestrians with visual impairments,” in Proceedings of the 13th International ACM SIGACCESS Conference on Computers and Accessibility (Dundee: ACM). p. 27–34. doi: 10.1145/2049536.2049544
[5] ↑ de Boer, M. R., Pluijm, S. M., Lips, P., Moll, A. C., Völker-Dieben, H. J., Deeg, D. J., et al. 2004. Different aspects of visual impairment as risk factors for falls and fractures in older men and women. J. Bone Miner. Res. 19:1539–47. doi: 10.1359/JBMR.040504
[6] ↑ Goodchild, M. F. 2007. Citizens as sensors: the world of volunteered geography. GeoJournal. 69:211–21. doi: 10.1007/s10708-007-9111-y