תַקצִיר
רובנו מתייחסים להתמצאות במרחב ולניווט בו כאל דברים מובנים מאליהם, ומשתמשים בצורה טבעית בחוש הראייה שלנו. אולם, עבור מיליוני אנשים עם לקויות ראייה ברחבי העולם התמצאות וניווט הם אתגר יום-יומי. להולכי רגל עם לקויות ראייה חסר מידע בסיסי לגבי המרחב שבו הם הולכים. מה שגורם להם להיות מוגבלים ותלויים באחרים, ופוגע ברווחתם וביכולותיהם החברתיות. לאחרונה, בוצע בטכניון מחקר שמטרתו לפתח תוכנה ויישׂומון לתכנון מסלולי הליכה המותאמים במיוחד עבור אוכלוסייה זו, תוך התמקדות ביכולות המוגבלות ובצרכים המיוחדים המאפיינים אותה. המחקר החדש מציע פתרון יעיל ומעשי לטובת הולכי רגל עם לקויות ראייה, המשפר את ניידותם, עצמאותם ורווחתם, ובכך מסייע להשתלבותם בחברה.
התמצאות במרחב ולקויות ראייה
בעולם חיים כיום יותר מ-1.3 מיליארד אנשים עם לקויות ראייה, יותר מ-40 מיליון מהם עיוורים, וּמִסְפָּרִים אלה צפויים לגדול בשנים הקרובות. מרבית הולכי הרגל הרואים יבחרו לצעוד במסלול ההליכה הקצר ביותר, תוך ניצול כישורים מולדים להתמצאות ולניווט. כישורים אלה משלבים ידע מרחבי שנגזר מהכרת המרחב ותפיסתו, ומְכֻנֶּה קוגניציה מרחבית [1]. תהליך ההתמצאות במרחב מתאפשר בזכות תאי מוח מיוחדים אשר בונים מפה הכרתית (כפי שפורסם במאמרו של דרדיקמן בפרונטירז, [2]), והוא חיוני עבור ניווט של הולכי רגל. היות שתהליך ההתמצאות מתבסס בעיקר על חוש הראייה, ומסתמך על גירויים חזותיים כגון ציוני דרך ומבנה רשת הדרכים, להולכי רגל עם לקויות ראייה אין מסוגלוּת לפתח יכולת דומה [3]. יתרה מזו, קשה להם להתגבר על מכשולים פיזיים וסכנות המצויים בדרכם כגון סדקים במדרכה, ספסלים המוצבים על המדרכה ואזורים המשותפים לרוכבי אופניים ולכלי רכב ממונעים [4]. אי לכך, התמצאות וניווט הם משימות מורכבות, ולעיתים קרובות אף מסוכנות, עבור הולכי רגל בעלי לקויות ראייה, שהם פגיעים יותר ומוּעדים לנפילות ולפציעות [5]. כפועל יוצא, הנמנים עם אוכלוסייה זו לא יצעדו לבד במסלולים שאינם מכירים, כך שניידותם מתמעטת ועצמאותם נפגעת, מה שמגביל אותם לבתיהם ומשפיע על רווחתם. למרות פיתוחן של טכנולוגיות מסייעות כגון זיהוי מכשולים וסיווגם בעת הליכה1 והקראת טקסט מִשְּׁלָטִים2, אין כיום פתרון טכנולוגי המספק להולכי רגל בעלי לקויות ראייה מידע על אודות המרחב, והַכְוָנָה למסלולים בטוחים, נגישים ונוחים, המותאמים לצורכיהם ולהעדפותיהם.
תכנון מסלול להולכי רגל עם לקויות ראייה
יישׂומוני הניווט מציעים שירות אמין לרוב הציבור, אך אינם נותנים מענה למשתמשים בעלי לקויות ראייה, כך שנדרש פיתוח יישׂומון ייעודי, מותאם ומונגש. במסגרת המחקר שבוצע בטכניון, נבחן השימוש בשירות המפות הדיגיטלי מבוסס קוד פתוח – OpenStreetMap (OSM) – עבור פיתוח תוכנה (מנוע חיפוש) לתכנון מסלול הליכה מיטבי המותאם להולכי רגל עם לקויות ראייה.3OSM הוא פרויקט מפות מקוון המושתת על רעיון מִקּוּר המונים, שבו משימת יצירת המפה מבוצעת בדרך של איסוף נתונים ומידע גיאוגרפי על ידי קהל גדול של אזרחים מכל העולם. במסגרת פרויקט זה, כל אחת ואחד, מכל מדינה, יכולים להוסיף נתונים ולעדכן נתונים במפה כגון דרכים, בתים, תחנות אוטובוס, צמחייה ועוד [6] (היישׂומון ''פּוֹקִימוֹן גוֹ'', לדוגמה, מתבסס על מפות OSM). מֵעֵבֶר להיקף הנתונים העצום ולעדכניותם, OSM מאפשר לשמור במפה נתונים שאי אפשר למצוא במפות אחרות (כמו גוגל מפות), למשל מידע על אמצעי נגישות במעברי חצייה וברמזורים – אמצעים המשפיעים ישירות על תכנון המסלול המיטבי, כך שיהיה בטוח ונגיש יותר מהמסלול הקצר. כדי שניתן יהיה לחשב מסלול כזה, נדרש תהליך מִטּוּב שמַקְנֶה העדפה לתכונות מרחביות מסייעות כגון אמצעי נגישות ובטיחות הדרך, ומנסה להימנע מתכונות מרחביות מְסַכְּנוֹת כגון צמתים מסוכנים ודרכים המשותפות גם לכלי רכב. כדי להשלים את פיתוח התוכנה ביצענו כמה שלבי מחקר:
1. עריכת ריאיונות ותצפיות – תהליך שבו נלמדו הסיבות והתנאים להנגשת מסלול והפיכתו בטוח עבור אוכלוסיית היעד. לשם כך נערכו ריאיונות ממוקדים עם משתמשים (הולכי רגל עם לקויות ראייה) ומדריכות שיקומיות מעמותת מגדל אור4 (איור 1). כמו כן, בוצעו תצפיות על משתמשים שניווטו בסביבה עירונית, שכּללו אימון ותרגול של מסלולי הליכה. המיקוד התייחס להֲבָנַת הסכנות והמגבלות אשר עומדות בפני הולכי רגל עם לקויות ראייה בסביבה עירונית, ואֵילוּ שיטות מסייעות להם לשפר את יכולות ההתמצאות והניווט.
2. פיתוח מערך חוקים שמגדיר מסלול מיטבי – בהתייחס להיבטים שונים, על בסיס הנתונים והממצאים שעלו מהראיונות והתצפיות לעיל:
- מורכבוּת המסלול – מסלולים ישרים עדיפים על מסלולים שיש בהם פניות רבות, שמוסיפות למורכבוּת המסלול ומקשות על התמצאות וניווט.
- ציוני דרך – נקודות ציון נגישוֹת, קבועות ונייחות, כגון רמזורים, עמודים ותחנות אוטובוס, מסייעות להולכי הרגל בעת ניווט ומקילות על ההתמצאות במסלול המתוכנן.
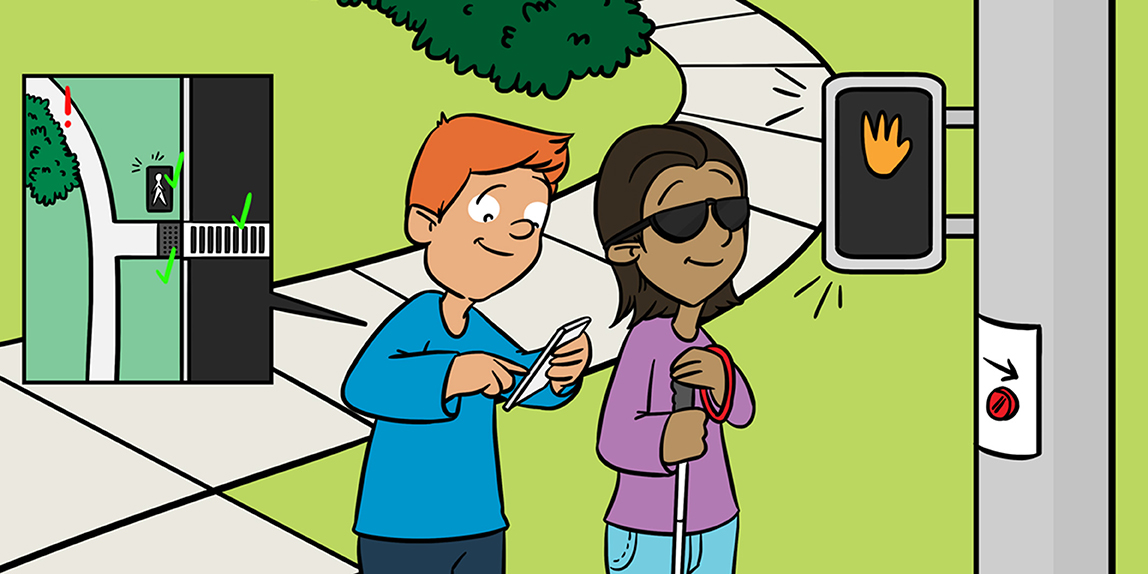
- עזרי נגישוּת – ציוד טכנולוגי מסייע שנמצא לרוב ליד צמתים ומעברי חצייה, ומחווה להולך הרגל באמצעי רֶטֶט או שֵׁמַע מתי לחצות. גם מדרכת מישוש מוכרת כאמצעי מסייע (איור 2).
- סוג הדרך – ישנם סוגי דרך מסייעים ובטוחים כגון מדרכות, וסוגי דרך מַקְשִׁים וּמְסַכְּנִים כגון שבילי עפר או דרכים המשותפות גם לכלי רכב. נוסף על כך ישנהּ חשיבות לאיכות הדרך (בורות, לדוגמה, מהווים סכנה).
- סכנות ומכשולים – יש להימנע מגורמים המפריעים להליכה בטוחה. לדוגמה, חניות רכב ועמודים על המדרכה. פארקים או רחבוֹת, שאין בהם שבילים מוסדרים, מקשים על ההתמצאות.
- צמתים – מידת הבטיחות והנגישות להולכי רגל עם לקויות ראייה משתנה מצומת לצומת. ככלל, ניתנת עדיפות לצמתים שיש בהם מעברי חצייה מוסדרים לרבּות רמזורים, תוך הימנעות מחציית צמתים שמתאפיינים בהסתעפויות כביש רבות ובאיי תנועה.
- אורך המסלול – העדפה למסלולים קצרים יותר.
3. מתן ציונים (משקולות) – בהסתמך על מערך החוקים הנ''ל, ניתנים ציונים מסייעים (לדוגמה, עזרים טכנולוגיים) או מְסַכְּנִים (לדוגמה, דרכים משותפות ובורות במדרכה) על כל מקטעי הדרך שישנם ברשת הדרכים. תהליך מִטּוּב מבצע חישוב מצטבר במטרה למצוא את המסלול עם הציון הכולל הנמוך ביותר, שהוא המסלול המיטבי מבּין כל המסלולים האפשריים בין נקודת המוצא לנקודת היעד. באופן זה ניתן לתכנן מסלול בין כל נקודת מוצא לנקודת יעד ברשת הדרכים, ולחשב את המסלול המונגש והבטוח עבור אוכלוסיית הולכי הרגל בעלי לקויות ראייה.

- איור 1 - תצפיות על משתמשים ומדריכות שיקומיות, עמותת מגדל אור (מקור: עמותת מגדל אור).

- איור 2 - (A) מדרכת מישוש לפני מעבר חציה ועל פניו (משמאל).
- (B) אמצעי הנגשה המיידע מתי לחצות. עזרים מסייעים אלה מקלים על התמצאות הולכי רגל עם לקויות ראיה, ותורמים ליכולת הניווט שלהם (מקור: Wikimedia).
חישוב מסלולים בקמפוס הטכניון
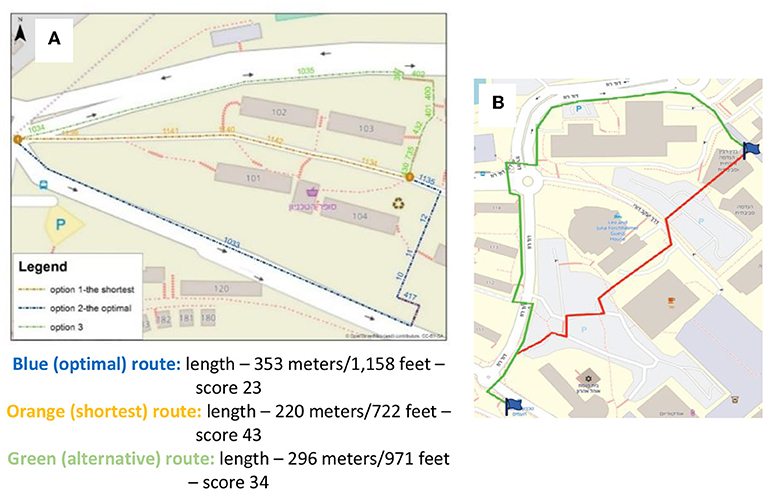
אזור הניסוי במסגרת המחקר היה קמפוס הטכניון, חיפה. נתוני מיפוי הוזנו למפת OSM כדי לקבל תמונה מקיפה ומעודכנת של הסביבה. באיור 3A מתוארות שלוש חלופות של מסלולים שחושבו על ידי מנוע תכנון המסלול, פירוט האורך המצטבר עבור כל חלופה והציון שניתן לה. נקודת המוצא היא הכניסה הראשית לקמפוס הטכניון, ונקודת היעד היא מעונות הסטודנטים. המסלול הכתום הוא המסלול הקצר ביותר, והמסלול הכחול הוא המיטבי. המסלול הקצר מסוכן מאוד להולכי רגל עם לקויות ראייה מאחר שאין בו מדרכה מוסדרת, והוא עובר בכביש שירות המשמש גם לנסיעת כלי רכב. לעומת זאת המסלול המיטבי שומר על כיוון ברור לצד כביש, יש לאורכו ציוני דרך והוא מורכב אך ורק ממדרכות בטוחות להליכה. כאשר ביקשנו ממדריכה שיקומית לתכנן מסלול עבור הולך רגל עם לקות ראייה בין נקודות המוצא והיעד הנ''ל, המדריכה בחרה במסלול שהיה זהה לחלוטין למסלול המיטבי שחושב על ידי המערכת שפותחה. כמו כן, הולך רגל בעל לקות ראייה שהתבקש ללכת במסלול נוסף בקמפוס, דיווח שהמסלול המיטבי שחושב על ידי התוכנה היה נוח וקל יותר להליכה, והוא אף חש שמסלול זה קצר יותר, למרות שבפועל המסלול המיטבי היה ארוך מהמסלול הקצר ביותר בין אותן נקודות מוצא ויעד.
- איור 3 - חלופות מסלולים מחושבים בקמפוס הטכניון.
- (A) שלוש חלופות מסלול בקמפוס הטכניון. מסלול כחול – מסלול מיטבי עם הציון הנמוך ביותר (23); מסלול כתום – המסלול הקצר ביותר, אך עם ציון גבוה מזה של המיטבי (43). (B) שתי חלופות מסלול בקמפוס הטכניון. מסלול ירוק – מסלול מיטבי עם הציון הנמוך ביותר; מסלול אדום – המסלול הקצר ביותר, אך עם ציון גבוה מזה של המיטבי (רקע: מפת OSM).
באיור 3B מוצגת דוגמה נוספת של מסלול שחושב בין תחנת האוטובוס הראשית בקמפוס הטכניון לבניין הפקולטה להנדסה אזרחית וסביבתית. גם כאן נבחר על ידי המערכת המסלול הירוק, שהוא המיטבי. שלא כמסלול האדום שהוא הקצר יותר, המסלול המיטבי נמנע מחציית כבישים ללא מעברי חצייה מוסדרים, ומהליכה במתחמי חניית רכב המְּסַכְּנִים הולכי רגל עם לקויות ראייה.
תובנות מהמחקר – לרווחת לקויי הראייה ואוכלוסיות נוספות
הולכי רגל עם לקויות ראייה נדרשים ליישום כישורי התמצאות וניווט ייחודיים, תוך שימוש במידע סביבתי לא-חזותי, המהווה אתגר מבחינה הכרתית. המחקר שאנו עורכים מציע להתגבר על קשיים אלה באמצעות שימוש בנתוני מיפוי קוד פתוח, ותכנון מערך חוקים מותאם ליצירת מסלולי הליכה מיטביים. תוצאות הניסויים שנערכו בקמפוס הטכניון מצביעות על כך שהמסלולים שחושבו על ידי התוכנה כמיטביים היו נגישים ובטוחים יותר בהשוואה למסלולים הקצרים, והיו זהים למסלולים שאותם תכננו מדריכות שיקומיות. לממצאים ולכלים שפותחו במהלך המחקר פוטנציאל לשפר את רווחתם של הולכי רגל בעלי לקויות ראייה, והם מציעים ערכים מוספים בדמות תרומה חברתית והעצמה משמעותית לקהילה. נוסף על כך ניתן להתאים תובנות שהתקבלו מהמחקר לאוכלוסיות נוספות, ולשלב את הפתרונות המוצעים בתכנון עירוני, כדי להבטיח עיצוב ערים נגישוֹת המתחשבות בצורכי אוכלוסיות עם לקויות שונות.
גם אתן ואתם יכולים לעזור
כדי שמנוע תכנון המסלול יפעל בצורה אמינה וישרת את הולכי הרגל עם לקויות ראייה שישתמשו ביישׂומון הייעודי, יש צורך במפה שלמה ועדכנית. כל אחת ואחד יכולים להוסיף לפרויקט OSM נתונים חסרים ולעדכן בו נתונים – בידיכם האפשרות לתרום על ידי מיפוי אזור המגורים שלכם. מיפוי ועדכון של מדרכות ומעברי חצייה ישפרו מהותית את יכולות התוכנה ואמינותה, ויתרמו רבות למאמץ החברתי החשוב (ראו תיבה 1). בהצלחה!
תיבה 1. רוצים ללמוד עוד ולתרום למחקר?
להתנסוּת במנוע תכנון המסלול שפותח במחקר (כרגע עובד בישראל, ובעתיד במדינות נוספות), לחצו כאן
לסרטון המתאר את המחקר, לחצו כאן
לפרויקט מדע אזרחי בבית הספר – סימני דרך למרחב נגיש, לחצו כאן
ליישומון שפותח בטכניון, למיפוי נתונים ב-OSM עבור הולכי רגל עם לקויות ראייה (גרסת ביתא), לחצו כאן
להזנת נתוני מיפוי למפת OSM, לחצו כאן
מילון מונחים
התמצאות (Orientation): ↑ מיומנות המערבת מציאת מקומות וניווט במרחב, ומאפשרת לנו להגיע ממקום למקום. מוכרת כמרכיב ההכרתי-הסקתי בתהליך הניווט – מרכיב הכולל יכולות תכנון מסלולים יעילים בין מוצא ויעד, מציאת מיקומים מסוימים וזיהוי יעדים.
קוגניציה מרחבית (Spatial cognition): ↑ הידע והאמונות שלנו ביחס לתכונות המרחביות של אובייקטים ואירועים בעולם. לימוד סביבתנו מאפשר לנו לזהות את מיקומנו במרחב ואת אפשרויות הניווט.
ציוני דרך (Milestones): ↑ אובייקט טבעי או מעשה ידי אדם, בולט או שונה מסביבתו, הניתן לזיהוי לאורך המסלול שבו אנו מנווטים. לדוגמה, הר, מבנה מעניין, נהר או מגדל.
קוד פתוח (Open source): ↑ מודל פיתוח תוכנה המעודד שיתוף פעולה, פתוח וזמין באופן חופשי לציבור ומאפשר צפייה, עריכת שינויים והפצה. כל מי שמעוניין יכול לקחת חלק בפיתוח התוכנה, קידומה ושיפורה.
תכנון מסלול (Route planning): ↑ מנוע חיפוש למציאת מסלול הליכה או נסיעה מיטבי בין שני מיקומים או יותר במרחב. התוכנה יכולה לבצע אופטימיזציה לחיפושים שונים לפי קריטריונים ואילוצים שונים, למשל, המסלול המהיר/ הקצר/ הזול ביותר.
מִקּוּר המונים (Crowdsourcing): ↑ מודל המאפשר ביצוע משימה, שלרוב מבוצעת בידי אנשי מקצוע, על ידי קבוצה גדולה של אנשים בלתי מומחים.
מִטּוּב (Optimization): ↑ תהליך מתמטי המאפשר בחירת פתרון מיטבי בהתאם לקריטריונים וחוקים מוגדרים, מתוך קבוצה של חלופות אפשריות.
הצהרת ניגוד אינטרסים
המחברים מצהירים כי המחקר נערך בהעדר כל קשר מסחרי או פיננסי שיכול להתפרש כניגוד אינטרסים פוטנציאלי.
הערת שוליים
1. ↑ https://www.senderogroup.com
2. ↑ https://www.orcam.com/en/myeye2/
3. ↑ https://www.openstreetmap.org
4. ↑ https://www.migdalor.org.il/
מאמר המקור
↑Cohen, A., and Dalyot, S. 2020. Route planning for blind pedestrians using OpenStreetMap. Environ. Plan. B Urban Anal. City Sci. 48:2399808320933907. doi: 10.1177/2399808320933907
מקורות
[1] ↑ Montello, D. R. 2005. “Navigation,” in The Cambridge Handbook of Visuospatial Thinking, eds P. Shah and A. Miyake (New York, NY: Cambridge University Press). p. 257–94. doi: 10.1017/CBO9780511610448.008
[2] ↑ Derdikman, D. 2020. How does the brain know where we are? Front. Young Minds. 8:59. doi: 10.3389/frym.2020.00059
[3] ↑ Fernandes, H., Costa, P., Filipe, V., Paredes, H., and Barroso, J. 2017. A review of assistive spatial orientation and navigation technologies for the visually impaired. Univers. Access Inf. Soc. 18:155–68. doi: 10.1007/s10209-017-0570-8
[4] ↑ Yang, R., Park, S., Mishra, S. R., Hong, Z., Newsom, C., Joo, H., et al. 2011. “Supporting spatial awareness and independent way finding for pedestrians with visual impairments,” in Proceedings of the 13th International ACM SIGACCESS Conference on Computers and Accessibility (Dundee: ACM). p. 27–34. doi: 10.1145/2049536.2049544
[5] ↑ de Boer, M. R., Pluijm, S. M., Lips, P., Moll, A. C., Völker-Dieben, H. J., Deeg, D. J., et al. 2004. Different aspects of visual impairment as risk factors for falls and fractures in older men and women. J. Bone Miner. Res. 19:1539–47. doi: 10.1359/JBMR.040504
[6] ↑ Goodchild, M. F. 2007. Citizens as sensors: the world of volunteered geography. GeoJournal. 69:211–21. doi: 10.1007/s10708-007-9111-y