
תַקצִיר
ברחבי האינטרנט ישנם סרטונים המציגים ידיים תותבות (מלאכותיות) הפועלות על חשמל, אשר נראות כתחליפים כמעט מושלמים ליד חסרה. עם זה עבור משתמשים רבים, המציאות עשויה להיות שונה למדי. ידיים תותבות אינן תמיד מגיבות כמצופה, מה שעשוי להיות מתסכל. יד תותבת נשלטת על ידי אותות שריריים בחלק שנותר מידו הפגועה של האדם, בעזרת חיישנים הנקראים אלקטרודות. האלקטרודות מוטמעות בתושֶׁבֶת, שהיא החלק של היד התותבת המחבּר אותה אל זרוע האדם. כאשר האדם מפעיל את שריריו, היד יכולה להיפתח, להיסגר, או לשנות את אחיזתה. אם התושבת זזה, היא עשויה לנתק את האלקטרודות מהעור. כתוצאה מכך לא ניתן לזהות כראוי את פעילות השרירים המעידה על כוונותיו של האדם, והיד אינה מתפקדת בצורה מוצלחת. במאמר זה, נסביר מדוע תושבת מותאמת עשויה להיות החלק החשוב ביותר של היד התותבת.
מבוא
תארו לעצמכם שאתם מחזיקים משקה, והיד שלכם נפתחת לפתע, או שאתם מותחים את היד כדי לאחוז בכוס, וכף היד ממאנת להיפתח. קל להבין עד כמה זה מפריע כשאי אפשר להסתמך על הידיים, שיעשו מה שאתם רוצים. למרבה הצער, זו המציאות של חלק מהאנשים המשתמשים בתותבות. תוֹתֶבֶת היא חלק גוף מלאכותי. במאמר זה אנו מתייחסים בראש ובראשונה לידיים תותבות.
כאשר לאנשים אין יד (כי כך נולדו, או משום שהיא נקטעה), לעיתים קרובות מְספּקים להם תותבת. בדרך כלל מְעַצְּבִים את התותבת כך שתיראה כמו יד אמיתית, ומטרתה לבצע חלק מהיכולות של היד החסרה.
ישנם שלושה סוגים נפוצים של ידיים תותבות [1–4]:
- תותבת פּסיבית – היד עשויה להיות קשיחה, או שבאמצעות היד השנייה ניתן לעצֵּב את צורתה כך שתהיה פתוחה או סגורה, במטרה לסייע בביצוע משימות;
- תותבת המופעלת על ידי הגוף – נעשה שימוש בתנועות הכתף או הזרוע כדי למשוך את הכּבל ולגרום ליד להיפתח או להיסגר;
- תותבת מופעלת חיצונית – נעשה שימוש בסוללות כדי לפתוח את היד ולסגור אותה בצורה פעילה; רוב התותבות מסוג זה נשלטות על ידי אותות שריריים (איור 1).
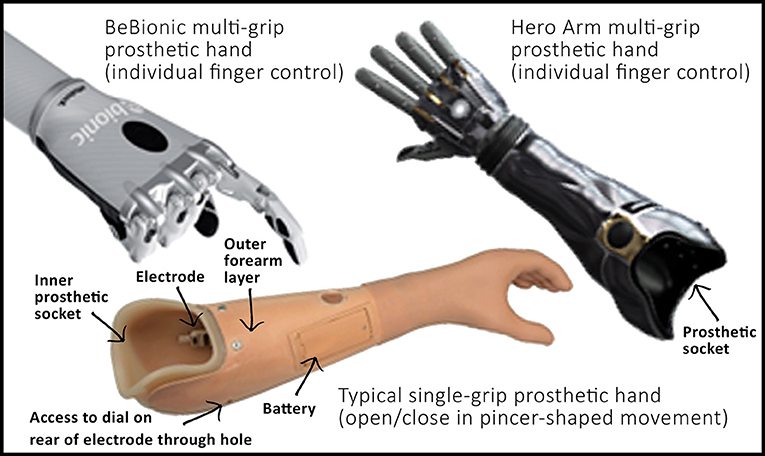
- איור 1 - דוגמאות לזרועות תותבות מִיוֹאֶלֶקְטְרִיוֹת.
- ישנן ידיים שנפתחות בתנועה דמוית-צְבָת. בידיים אחרות, ניתן לשלוט בכל אצבע בצורה עצמאית, מה שמאפשר ליד לייצר צורות אחיזה שונות (לדוגמה, אצבע מצביעה מאפשרת למשתמש ללחוץ על הכפתור של עכבר המחשב). ניתן לראות כי היד מחוברת לחלק של אַמַּת היד – החלק בזרוע שבין מִפרק כף היד למַרפק (השכבה החיצונית), ושיש לה תושבת פנימית שאליה האדם יכול להכניס את זרועו. עיצוב התושבת הפנימית מבוסס על צורת זרועו של המשתמש, בשימוש בתבנית גבס, או באמצעות סורק ותוכנת מחשב. מקרא: BeBionic multi-grip prosthetic hand (individual finger control) = יד תותבת בעלת כמה אחיזות של BeBionic (שליטה עצמאית בכל אצבע); Typical single-grip prosthetic hand (open/close in pincer-shaped movement) = יד תותבת טיפוסית בעלת אחיזה אחת (נפתחת ונסגרת בתנועת צבת): Outer forearm layer = השכבה החיצונית של אַמַּת-היד;
במאמר זה נתמקד בסוג השלישי של תותבות, המכונה תוֹתֶבֶת מִיוֹאֶלֶקְטְרִית. בסרטונים מצטייר לעיתים הרושם כי תותבות מיואלקטריות הן תחליף כמעט מושלם1, אך עבור משתמשים רבים הן לא תמיד פועלות כמצופה מהן. לפעמים, תותבות מיואלקטריות נפתחות כשהן לא אמורות לעשות זאת, או אינן נפתחות כשהן כן אמורות להיפתח.
כיצד פועלת תותבת מיואלקטרית?
ידיים תותבות מיואלקטריות מסתמכות על אותות חשמליים קטנים שהשרירים מייצרים (’מִיוֹ’ בא מהמילה היוונית ’שריר’). כשאתם רוצים להזיז חלק כלשהו בגוף, המוח שולח אותות לשרירי השלד באמצעות עצבים, המעוררים תגובה כימית שגורמת לשריר להתקצר או להתכווץ (אולי אתם מכירים את המונח ’לעשות שריר’). תוצאת הלוואי היא שכּמות קטנה של זרם חשמלי עובר דרך השריר. ניתן לזהוֹת את הזרם הזה באמצעות לוחיות מתכת (הנקראות אֶלֶקְטְרוֹדוֹת), שאותן ממקמים על העור. אם האלקטרודות קולטות שהאדם מנסה לכווץ את השריר, הן יכולות להפעיל את היד התותבת כך שתזוז. אולי תופתעו לגלות שהטכנולוגיה הזו נמצאת בשימוש מאז שנת 1944 [5], למרות שמאז היו פיתוחים רבים בעיצוב ידיים תותבות.
כיצד אנו מזהים אותות של שרירים?
באיור 2 ניתן לראות אלקטרודה המשמשת לזרוע תותבת. שלוש לוחיות המתכת מונחות על העור כדי לקלוט את האות החשמלי. הן פועלות באופן המיטבי כשמצטברת שכבה של זיעה בינן לבין העור, המפחיתה את ההתנגדות החשמלית. בתוך האלקטרודה יש אלקטרוניקה ש’מנקה’ את האות החשמלי, ומגבירה אותו.
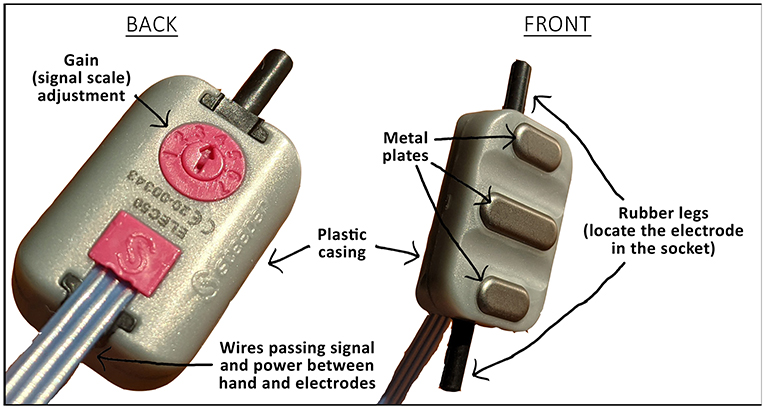
- איור 2 - האלקטרודה משמשת לשליטה ביד התותבת המיואלקטרית.
- שלוש לוחיות המתכת צריכות לשמור על רמת מגע טובה עם העור כדי להוליך את האות. בגב האלקטרודה יש חוגה המאפשרת לכוונן את רמת האות, כמו שמכוונים את הקול בטלוויזיה, או את הרגישוּת בבַּקָּר של משחקי וידיאו. ישנם גם חוטים שמעבירים את האות לבַּקָּר שנמצא בתוך היד. ’רגלֵי’ הגומי השחורות מחזיקות את האלקטרודות בתוך התושבת. מקרא: Back = צד אחורי: Gain (Signal adjustment scale) = הֶגְבֵּר (כיוונון של רמת האות); Wires passing signal and power between hand and electrodes = חוטים המעבירים את האות ואת החשמל בין היד לבין האלקטרודות; Plastic casing = כיסוי פלסטיק; Front = צד קדמי: Metal plates = לוחיות מתכת; (Rubber legs locate the electrode in the socket) = רגלי גומי (ממקמות את האלקטרודות בתוך התושבת); Plastic casing = כיסוי פלסטיק.
אנשי מקצוע בעלי הכשרה ביצירת תותבות מותאמות היטב נקראים מומחי תותבות. הם משתמשים ביציקת גבס של זרוע האדם, ויוצרים דגם תלת-ממדי שלה. לאחר מכן, בעבודה משותפת עם טכנאי, הם בונים את התושבת של התותבת באמצעות הדגם הַיָּצוּק (בדרך כלל מחומר קשיח-למחצה, כמו פלסטיק או סיב פחמן). התושבת היא חלק התותבת שלתוכו מכניסים את הזרוע (איור 1). אפשר לעצֵּב את התושבת כך שתהיה צמודה יותר לזרוע בחלקים מסוימים, ושתישאר במקומה ומשוחררת יותר בחלקים אחרים, רגישים יותר (כמו רִקמת הצלקת או האזור שנמצא מעל לעצמות) – הדבר דומה מעט להתאמַת נעל. חשוב מאוד שמומחה התותבות יתאים את התותבת בצורה הנכונה.
רגלי גומי קטנות מחזיקות את האלקטרודות בַּמָּקוֹם בתוך תושבת התותבת (איורים 2, 3). בזמן השימוש הרגיל, התושבת יכולה לזוז קצת על פני השרירים והעצמות. כיוון שהאלקטרודות מחוברות לתושבת, ייתכן שגם הן יזוזו מעט. אם התושבת משוחררת ונעה יותר מדי, האלקטרודות עלולות לשנות את מיקומן, ואז הן מתקשות לקלוט את אותות השרירים, או מאבדות לחלוטין את המגע עם העור.
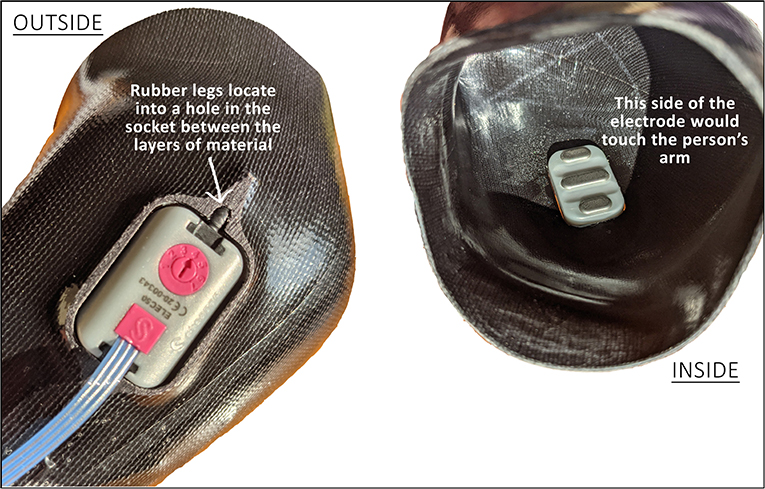
- איור 3 - האלקטרודות נכנסות לתוך שֶׁקַע שנמצא בתושבת הפנימית, המעוצבת סביב זרוע המשתמש.
- מבחוץ (תמונה שמאלית), ניתן לראות את אחת מ’רגלי’ הגומי השחורות הנכנסות אל תוך החומר ומחזיקות את האלקטרודה במקומה. השכבה החיצונית המעוצבת בצורת אַמַּת-היד (מוצגת באיור 1), מתחברת מעל לחלק העליון של התושבת הפנימית, ומכסה את גב האלקטרודה. מקרא: Outside = בחוץ: Rubber legs locate into a hole inthe socket between the layers of the material = רגלי גומי ממוקמות בשֶׁקע שבתושבת, בין שכבות החומר; Inside = בפנים: This side of the electrode would touch the person’s arm = הצד הזה של האלקטרודה נוגע בזרוע המשתמש.
מדוע תזוזת האלקטרודות היא בעייתית?
אנו חיים בסביבה שיש בה הרבה ’רעש’ חשמלי, ומוקפים בכבלי חשמל ובאותות רדיו. הגוף האנושי פועל כמו אַנְטֶנָה – הוא קולט חשמל ונעשה טָעוּן. זו הסיבה לכך שלעיתים אנו חווים ניצוצות של חשמל סטטי. האותות ה’מרעישים’ הללו על פני העור יכולים להיות חזקים פי אלף מאשר אותות השרירים [5], ולכן האלקטרוניקה של האלקטרודות צריכה להיות מסוגלת לסנן אותם.
אם המגע בין העור לבין האלקטרודות משתנה, הַמַּסְנֵן (פִילְטֶר) אינו פועל בצורה מיטבית. האלקטרודות עלולות לזהוֹת בטעות את האותות החשמליים ה’מלכלכים’ כהתכווצות שריר, ולגרום ליד התותבת להיפתח או להיסגר באופן בלתי-צפוי. זה עלול לגרום למשתמש להפיל משהו, או לתפוס משהו ללא אזהרה מראש. אם האלקטרודה מאבדת מגע עם העור לחלוטין, או זזה כך שהיא כבר לא נמצאת מעל לשריר הנכון, ייתכן שהיא גם לא תצליח לזהות את האותות הרצויים, וכך אנשים יכולים להיתקע כשהם אוחזים משהו ביד. בְּתֶזַת הדוקטורט שלה ד”ר Tara Simms מציגה דוגמה טובה, שבה סטודנט היה נבוך כאשר לא הצליח לשחרר את יד המנהל שלו כשלחץ אותה [6]. חוסר היכולת לִצְפות מה יקרה עשוי להגביל את מידת האמון שאנשים נותנים בתותבת שלהם, כמו גם את רמת השליטה שלהם בתותבת.
ההשלכות של תנועות ידיים בלתי-צפויות
כדי להבין עד כמה הבעיה של תנועות ידיים בלתי-צפויות היא נפוצה, אָסְפוּ מידע מ-20 אנשים באנגליה המרכיבים תותבות, אשר ניתנו להם על ידי שירותי הבריאות הלאומיים [7]. ביקשו מהם להזיז את זרועם מעלה ומטה, כאילו הם שולחים יד למדף או למגירה. במהלך ביצוע התנועות (24 בסך הכול), המשתתפים לא ניסו לפתוח את היד התותבת שלהם, או לסגור אותה. 70% מהמשתתפים (14 אנשים) חוו תזוזה ביד התותבת, למרות שלא הייתה אמורה לזוז.
אם היד התותבת נפתחת או נסגרת כשאינה אמורה לעשות זאת, על אף התסכול, האם הדבר קשור באמת לעד כמה אנשים יכולים להשתמש בה בצורה טובה? כדי למדוד זאת, ביקשנו ממרכיבי התותבת לבצע משימה פשוטה: להרים גליל ולהניח אותו בתוך צינור. תיעדנו אם המשתתפים ביצעו את המשימה בצורה חלקה (בלי להפיל את הגליל); כמה זמן לקח להם לבצע אותה, ולאן הם הביטו. גילינו כי האנשים שידיהם נפתחו או נסגרו באופן בלתי-צפוי במשימה הקודמת הצליחו פחות גם במשימת הגליל, ולקח להם יותר זמן להשלים אותה. הם גם הביטו ביד התותבת במשך זמן רב יותר, מה שמעיד על כך שכבר לא בטחוּ כל כך בתפקודהּ.
רצינו לחקור כיצד אנשים בחרו להשתמש בתותבות שלהם בחיי היומיום. למשך שבוע אחד, המשתתפים עָנְדוּ חיישנים קטנים על שני פרקי כפות הידיים, כמו אלה שיש בצמיד כושר או בשעון חכם, כדי למדוד את תנועת הזרועות שלהם. השתמשנו בחיישנים הללו כדי לחשֵּׁב במשך כמה שעות הם הרכיבו את התותבת, וכמה שימוש הם עשו בכל זרוע. עבור אנשים בעלי שתי ידיים וללא בעיות בריאותיות, הבחנו בשימוש של 50% בכל זרוע. עבור משתמשי תותבות המרכיבים את התותבת שלהם, רבים עדיין הסתמכו על היד המתפקדת שלהם בשיעור של כ-80%. המשמעות היא כי על אף שהרכיבו תותבת שעוצבה במטרה לסייע להם בביצוע משימות יומיומיות, הם בחרו להשתמש במקום זאת בזרועות הבריאוֹת שלהם.
מעניין לציין שלא היה קשר בין העובדה שהיד פעלה בצורה בלתי-צפויה במחקר המעבדה הקודם שלנו, לבין הזמן שבו אנשים השתמשו בתותבת בבית, או המידה שבה הם הסתמכו עליה. ניתן להסיק מכך כי חלק מהאנשים עשויים להיות סבלניים כלפי יד תותבת שתפקודהּ בלתי-צפוי, אם היא מסייעת להם להשיג את מטרותיהם.
דרכים אפשריות להפחתַת תנועת האלקטרודות
עם העיצוב הקיים של האלקטרודות ושל תושבת הזרועות התותבות, לא סביר שנצליח להימנע מתנועות בלתי רצויות. לכן, ישנם אנשים הבוחנים פתרונות אחרים. פתרון אחד, מורכב ויקר, הוא להשתיל את האלקטרודות מתחת לעור, בתוך השריר עצמו [8–10]. פתרונות אחרים כוללים למשל הכנסַת האלקטרודות לתוך גרב נמתחת ואלסטית שתצמיד אותן אל העור [11]. ישנם פיתוחים נוספים של דרכים חדשות לקיבוע האלקטרודות בתוך התושבת, כדי למנוע מהן תזוזה כאשר התושבת זזה [12]. חלק מהטכנולוגיות הללו דורשות מחקר מעמיק יותר לפני שיהיו זמינוֹת לכול.
סיכום
תיארנו כמה סוגי תותבות של הגפיים העליונות, בכלל זה מכשירים מיואלקטריים. הסברנו כיצד ניתן לשלוט בהן, והשתמשנו בחלק מהמחקרים שלנו כדי להציג את הבעיות שהמשתמשים עלולים לחוות בעולם האמיתי. לבסוף, הצגנו כמה מהרעיונות הנחקרים כיום במטרה להתגבר על הבעיות הללו. יהיה הפתרון אשר יהיה, אנו מקווים שהצלחנו לשכנע אתכם כי חשוב מאוד להתאים את התושבת היטב, כך שהאלקטרודות יוכלו לזהוֹת בצורה אמינה את האותות שנוצרים אצל המשתמש.
מילון מונחים
תוֹתֶבֶת (Prosthesis): ↑ חלק גוף מלאכותי.
קטיעה (Amputation): ↑ הסרַת איבר באמצעות ניתוח. קטיעה עשויה להתרחש בעקבות תאונה או בּשֶׁל מחלה כלשהי.
קשיח (Rigid): ↑ עצם קשיח אינו גמיש, וצורתו לא יכולה להשתנות. לעצם קשיח-למחצה יש גמישוּת כלשהי, אך צורתו עדיין נשמרת היטב.
תוֹתֶבֶת מִיוֹאֶלֶקְטְרִית (Myoelectric prosthesis): ↑ תוֹתֶבֶת מסוג זה עושה שימוש באותות חשמליים הנוצרים בתוך השרירים כדי לשלוט בתנועות היד התותבת.
אֶלֶקְטְרוֹדוֹת (Electrodes): ↑ אלקטרודות מורכבות מלוחות מתכת המוליכים אותות חשמליים שנוצרים בשרירים, ומאלקטרוניקה ה’מנקה’ את האותות הללו, ומגבירה אותם. אז האותות נשלחים לבַּקָּר, המוֹרֶה ליד התותבת איך לזוז.
מומחי תותבות (Prosthetist): ↑ אנשי מקצוע בעלי הכשרה קלינית, אשר עובדים עם אנשים שאיבדו איבר. הם מנחים את המשתמשים בבחירת התותבת הנכונה, מְעצבים ומכינים את התושבת, ומתאימים אותה למשתמשים.
תודות
הכותבים מבקשים להודות ל- Charlie Prince (בן 13), שקרא את כתב-היד וסיפק לנו משוב יעיל לגבי השימוש בשפה במאמר.
הצהרת כלי בינה מלאכותית
טקסט חלופי הנלווה לאיורים במאמר זה נוצר על ידי פרונטירז בסיוע כלי בינה מלאכותית, ונעשו מאמצים על מנת להבטיח את דיוקו, כולל בדיקה על ידי כותבי המאמר כאשר הדבר התאפשר. אם ברצונכם לדווח על בעיה, אנו צרו איתנו קשר.
הצהרת ניגוד אינטרסים
המחברים מצהירים כל המחקר נערך בהעדר כי קשר מסחרי או פיננסי שיכול להתפרש כניגוד אינטרסים פוטנציאלי.
הערת שוליים
1. ↑לדוגמה, רְאו https://youtu.be/F_brnKz_2tI
Electrode = אלקטרודה;
Inner prosthetic socket = התושבת הפנימית של התותבת;
Access to dial on rear of electrode through hole = גישה לחוּגה מאחורי האלקטרודה דרך שֶׁקַע;
Battery = סוללה;
Hero Arm multi-grip prosthetic hand (individual finger control) = יד תותבת בעלת כמה אחיזות של Hero Arm (שליטה עצמאית בכל אצבע):
Prosthetic socket = תושבת התותבת.
מקורות
[1] ↑ Engels, L., and Cipriani, C. 2019. Nature’s masterpiece: how scientists struggle to replace the human hand. Front. Young Minds. 7:83. doi: 10.3389/frym.2019.00083. Available online at: https://kids.frontiersin.org/articles/10.3389/frym.2019.00083
[2] ↑ Plettenburg. D. H. 2006. Upper Extremity Prosthetics: Current Status & Evaluation, 1st Edn. Delft: VSSD. ISBN: 978-9-071-30175-9.
[3] ↑ Muzumdar, A. 2004. Powered Upper Limb Prostheses - Control, Implementation and Clinical Application, 1st Edn. Berlin: Springer. ISBN: 978-3-642-62302-8
[4] ↑ Maat, B., Smit, G., Plettenburg, D., and Breedveld, P. 2018. Passive prosthetic hands and tools: a literature review. POI 42, 66–74. doi: 10.1177/0309364617691622. Available online at: https://journals.sagepub.com/doi/full/10.1177/0309364617691622
[5] ↑ Childress, D. 1992. Upper-Limb Prosthetics: Control of Limb Prostheses. Chapter 6D - Atlas of Limb Prosthetics: Surgical, Prosthetic, and Rehabilitation Principles, 2nd Edn. American Academy of Orthopedic Surgeons. Available online at: http://www.oandplibrary.org/alp/chap06-04.asp
[6] ↑ Simms, S. 2014. A Participatory Design Approach to Developing Upper Limb Prostheses for Children and Young People. (PhD Thesis), University of Southampton, Southampton, United Kingdom. Available online at: https://eprints.soton.ac.uk/367055
[7] ↑ Chadwell, A., Kenney, L., Thies, S., Head, J., Galpin, A., and Baker, R. 2021. Addressing unpredictability may be the key to improving performance with current clinically prescribed myoelectric prostheses. Sci. Rep. 11:3300. doi: 10.1038/s41598-021-82764-6. Available online at: https://www.nature.com/articles/s41598-021-82764-6#citeas
[8] ↑ Salminger, S., Sturma, A., Hofer, C., Evangelista, M., Perrin, M., Bergmeister, K., et al. 2019. Long-term implant of intramuscular sensors and nerve transfers for wireless control of robotic arms in above-elbow amputees. Sci. Robot. 4:aaw6306. doi: 10.1126/scirobotics.aaw6306 Available online at: https://www.science.org/doi/10.1126/science.abb1073
[9] ↑ Nathan, S. 2019. Improving control of amputees’ prostheses with implanted electrodes. Engineer. Available online at: https://www.theengineer.co.uk/improving-control-prostheses-implanted-electrodes/
[10] ↑ Zhang, J., and Hoshino, K. 2019. Molecular Sensors and Nanodevices: Principles, Designs and Applications in Biomedical Engineering. Chapter 8 - Implantable and Wearable Sensors, 2nd Edn. Cambridge, MA: Academic Press. ISBN: 978-0-128-14862-4. Available online at: https://www.sciencedirect.com/science/article/pii/B9780128148624000089
[11] ↑ Reissman, T., Halsne, E., Lipshutz, R., Miller, L., and Kuiken, T. 2018. A novel gel liner system with embedded electrodes for use with upper limb myoelectric prostheses. PLoS ONE 13:e0198934. doi: 10.1371/journal.pone.0198934. Available online at: https://journals.plos.org/plosone/article?id=10.1371/journal.pone.0198934
[12] ↑ Head, J., Kenney, L., Nazarpour, K., Dyson, M., Varley, T., and Howard, D. Grant From the National Institute for Health Research Invention for Innovation (2020-2023). A Smart Electrode Housing to Improve the Control of Upper Limb Myoelectric Prostheses. ID: NIHR201310. Available online at: https://fundingawards.nihr.ac.uk/award/NIHR201310