תַקצִיר
לחלק מהאנשים יש רק יד אחת, או שאין להם ידיים כלל. חסרות להן ידיים מאז הלידה, או בשל תאונות או מחלות. תותבות של ידיים הן מכשירים מלאכותיים שמשמשים להחלפת ידיים חסרות. ידיים “פסיביות”, כלומר ידיים תותבות שלא נעות למעשה, נראות אמיתיות – הן קלות, עמידות ולא יקרות מדי. אולם כדי לאחוז דברים באופן פעיל אנשים צריכים תותבות “פעילוֹת”. אלה יכולות להיות ידיים מכניות פשוטות, או ידיים רובוטיות מורכבות ויקרות. לכל סוגי התותבים יש יתרונות וחסרונות, אולם מחקר עדכני מתמקד בעיקר בידיים רובוטיות פעילות חשמליות. אתגר אחד גדול ובלתי פתור הוא כיצד לאפשר למשתמשי תותבות לחוש באמצעות הידיים הרובוטיות שלהם. שיטות שונות רבות כבר נוסו, חלקן דורשות ניתוח, אולם מדענים עדיין אינם יכולים לשחזר תחושה טבעית באופן מלא.
הקדמה
אין זה מקרה שאנו מבקשים מאנשים “לתת יד” כשאנו זקוקים לעזרה. הידיים שלנו הכרחיות להכול, החל מיציאה מהמיטה וכלה בנגינה בפסנתר. אולם ישנם אנשים שיש להם רק יד אחת, או שאין להם ידיים. חלק מהאנשים לומדים ללא יד אחת או ללא שתיהן. אחרים מאבדים ידיים בתאונות כמו התנגשויות של מכוניות, במחלות כמו זיהומים בדם, או במלחמה. לעיתים קרובות אפשר לבצע פעולות רבות באמצעות יד אחת [1]. אנשים יכולים להשתמש בשיניים, בסנטר או ברגליים ובכפות הרגליים שלהם כדי להחזיק דברים ולהזיז אותם. לדוגמה, כדי לנסות לפתוח רוכסן של ז’קט עם יד אחת, האדם עשוי להשתמש בשיניים שלו להחזיק את הצווארון. עבור מטלות שלא ניתן לבצע בקלות באמצעות יד אחת ישנם כלים מסייעים. אולם כשיש שתי ידיים מטלות רבות נעשות קלות יותר, כמו פתיחת דלת בזמן שמחזיקים משהו. מלבד זאת, אנו משתמשים בידיים שלנו כדי לתקשר עם אחרים, כמו במחוות ובהצבעות [2].
מהן ידיים תותבות?
תותב הוא מכשיר מלאכותי שמחקה את תפקודו של איבר גוף. יותר ממחצית האנשים שחסרה להם יד או שחסרות להם שתי ידיים לובשים ידיים תותבות לפחות חלק מהזמן [1]. ישנם שני סוגים כלליים שונים: תותבות פסיביוֹת, כמו ידיים קוסמטיות או פסיביות, ותותבות אקטיביוֹת, כמו למשל ידיים שפועלות בהנעה גופנית או בהנעה חיצונית [1, 3].
מהן תותבות “פסיביוֹת”?
הצורות הפשוטות ביותר של ידיים תותבות, ידיים פסיביות קוסמטיות, נמצאו בשימוש לפני יותר מ-2,000 שנים במצרים העתיקה (איור 1A). הו שימשו למטרות אסתטיות, כלומר הן היו “בשביל המראֶה” יותר מאשר למטרות תפקודיות, והן נקראו תותבות “פסיביות” מאחר שהן לא יכלו לזוז ולתפוס משהו באופן אקטיבי. ידיים פסיביות קוסמטיות עדיין נמצאות בשימוש כיום, מאחר שהן יכולות להיראות מציאוּתיוֹת מאוד, וזה חשוב למרבית האנשים שלובשים אותן. אם החברה שלנו הייתה מקבלת יותר כלפי גופים שנראים אחרת ייתכן שאנשים היו מרגישים בנוח יותר להסתובב בציבור ללא תותבות קוסמטיות.
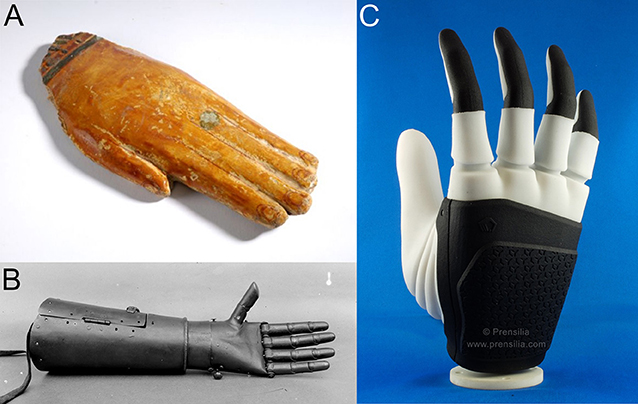
- איור 1 - אבולוציה של ידיים תותבות.
- (A) זוהי יד תותבה עתיקה ממצרים. (B) האצבעות של היד התותבת הזו מהברזל שמקורה בימי הביניים יכלו להינעל, מה שאפשר לאביר שלבש אותה להחזיק את מושכות הסוס שלו בזמן הרכיבה. (C) היד הזו, מסוג myoelectric hand, היא יד קטנה וקלה כמו יד טבעית. היא יכולה להזיז את האגודל ואת האצבע המורה באופן פרטני, ואת האמה, הקמיצה והזרת יחד. (A) באדיבות BY-NC-SA Leeds Museums and Galleries; (B) הזכויות שמורות ל- CC Attribution 3.0 Unported, Generallandesarchiv Karlsruhe 498-1 Nr. 5110 Bild 1; (C) שוחזר באישור של Prensilia S.r.l.
ליד פסיבית מכנית יש אצבעות שאפשר להזיז אותן בעזרת היד השנייה או בעזרת הסביבה. משמעות הדבר היא שיד מכנית יכולה לשמש להחזיק משהו. היד הפסיבית המכנית הראשונה פותחה ושימשה אביר גרמני בשם Gottfried “Götz” von Berlichingen במאה השש-עשרה (איור 1B).
במה נבדלות תותבות “אקטיביות”?
תותבות אקטיביות מאפשרות למשתמש לתפוס אובייקטים באמצעות תנועות מסוימות של הגוף וללא צורך להשתמש ביד השנייה. ישנם סוגים שונים של תותבות אקטיביות: תותבות שפועלות בהנעה גופנית ותותבות שפועלות בהנעה חיצונית.
תותבות שפועלות בהנעה גופנית, שהומצאו במאה התשע-עשרה, בדרך כלל מחוברות לגוף באמצעות רִתְמָה. הידיים או הווים בסופן נפתחים ונסגרים באמצעות תנועות גוף, כמו למשל הושטה קדימה של הזרוע (איור 2). התותבות האלה עשויות פלסטיק, מתכת ובד שמרכיבים את החגורות של הרתמה.
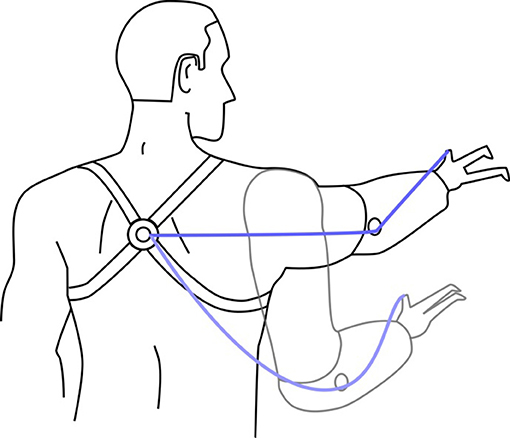
- איור 2 - מרבית התותבות שמופעלות בהנעה גופנית יכולות להיפתח באמצעות משיכת כבל, בדומה למעצורים של אופניים.
- הושטת היד קדימה או עיגול הכתפיים על גבי הכבל (בכחול) פותחים את התותבת. כשהיד משוכה לאחור והמתח בכבל משוחרר, התותבת נסגרת אוטומטית על-ידי גומייה או קפיץ.
תותבות שפועלות בהנעה חיצונית נמצאו בשימוש נרחב החל משנות ה-60′. הן נקראות באנגלית “externally-powered” מאחר שהן זקוקות למקור כח (power) חיצוני ,(external) כלומר סוללה. סוגי התותבות האלה הן הידיים והזרועות הרובוטיות המורכבות שלעיתים אתם רואים בסרטים או במשחקי מחשב (איור 1C). התותבות האלה מיוצרות מפלסטיק, ממתכת ומרכיבים חשמליים רבים, כמו למשל מנועים ומיקרו-מעבדים. המכשירים האלה גם נקראים תותבות מסוג מיואלקטרי (myoelectric). “Myo” מגיעה מיוונית ומשמעותה שריר. כשאנו מזיזים את השרירים שלנו נוצרים שדות חשמליים קטנים סביבם, אשר יכולים להימדד על-ידי אלקטרודות. באמצעות מיקום אלקטרודה על העור שעל גבי שריר אנו יכולים למדוד אם ועד כמה השריר זז. האות החשמלי הנמדד נשלח לתותבת דרך חוטים. האותות המיואלקטריים האלה אומרים לתותבת אם להימתח או להיסגר ובאיזו מהירות לזוז (איור 3).
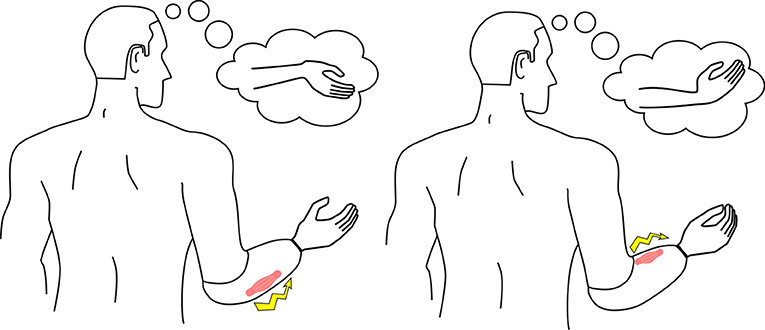
- איור 3 - כאשר רק היד חסרה, השרירים בזרוע משמשים לשליטה בתותבת מסוג.
- מיואלקטרי דימוי של כיפוף שורש כף היד החוצה הרחק מהגוף בדרך כלל פותח את התותבת, ודימוי כיפוף המפרק פנימה לעבר הגוף סוגר שוב את התותבת.
מדענים מנסים למצוא דרכים טובות יותר ויותר להשתמש באותות המיואלקטריים האלה כדי לשלוט בתותבות, כמו למשל הקלת השליטה ואפשור תנועות רבות יותר מאשר פתיחה וסגירה בלבד, לדוגמה תזוזה של אצבעות בודדות [2].
פיתוח עכשווי בתותבות של הגפיים העליונות נקרא “osseointegration” (מלטינית, “os” משמעותה עצם). בתהליך הזה התותבת לא מחוברת לתושבת שמכסה את הַגֶּדֶם, כפי שהיא משמשת בסוגים אחרים של תותבות פעילות. במקום זאת, ברגים מושתלים בעצמות הזרוע והיד התותבת מחוברת ישירות לעצם דרך הברגים האלה – בדומה לידיים הטבעיות שלנו (ראו את הקטע 0:14-1:12 ב-[4]). אולם, הניתוח והטיפול שאחריו דורשניים מאוד עבור המטופל.
איזו תותבת היא הטובה ביותר?
איזו תותבת לבחור תלוי גם בטעם אישי וגם נקבע על-ידי כמות הכסף שהמשתמש יכול להשקיע בתותבת [3]. תותבות שפועלות בהנעה גופנית יקרות יותר מתותבות קוסמטיות (טבלה 1). תותבות מסוג מיואלקטרי עולות אפילו יותר, וללא ביטוח בריאות רק אנשים מעטים יכולים לרכוש אותן. תותבות מסוג מיואלקטרי הן גם כבדות יותר מהסוגים האחרים וצריך לטעון את הסוללות שלהן כל יום. יתרה מזו, שליטה בהן דורשת שרירים בריאים וקצת אימון כדי להפעיל אותן באופן תקין. תותבות שפועלות בהנעה גופנית מגבילות את טווחי התנועה של הידיים ושל הזרועות כתוצאה מהרתמה, אולם הן עמידות יותר ומאפשרות הרמה והזזה של אובייקטים כבדים יותר. תותבות קוסמטיות לא מגבילות את טווח התנועה, הן קלות מאוד והן בדרך כלל נראות אמיתיות מאוד, אולם הן לא מאפשרות למשתמש לתפוס שום דבר באופן פעיל. חלק מהאנשים מעדיפים תותבות פשוטות ולא ידיים רובוטיות מורכבות, אשר יכולות להתקלקל בקלות יותר וקשה לתקן אותן.
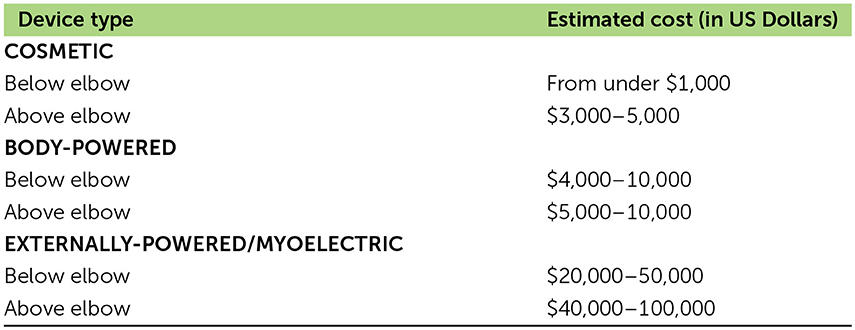
- טבלה 1 - עלויות משוערות של תותבות בארצות הברית. המחירים שונים משמעותית בין מדינות שונות.
תותבות מסוג מיואלקטרי יכולות להזיז את אצבעות היד לעמדות שונות, מה שמאפשר דרכים שונות של אחיזה (ראו 1:28-1:38 ו-2:22-2:59 ב-[4]). זה יכול להקל על האחיזה ולדרוש פחות “תנועות פיצוי”. תנועות פיצוי הן תנועות לא טבעיות שנדרשות מאחר שהתותבת לא יכולה לנוע כמו זרוע או יד טבעית [5]. לדוגמה, כדי לאסוף משהו שטוח מצידי השולחן המרפק של האדם שלובש תותבת פשוטה צריך להיות מורם הצידה כדי לפצות על המחסור בסיבוב שורש כף היד. בתותבות מודרניות מסוג מיואלקטרי יש אגודלים שיכולים לנוע כדי להיסגר על גבי האצבע המורה שלמעלה ולהחזיק משהו שטוח, מה שמייתר את הצורך להרים את המרפק. מחקר עכשווי מצביע על כך ששורש כף יד שאפשר להזיז אותו מסייע אפילו יותר בהפחתת תנועות פיצוי [5]. בשל היתרונות והחסרונות השונים האלה, אנשים רבים משתמשים בשתי תותבות או יותר [1].
האם אפשר להרגיש באמצעות יד רובוטית?
שאלה פתוחה גדולה אחת היא כיצד לחוש באמצעות תותבות [2, 6]. אנשים שמשתמשים בתותבות שפועלות בהנעה גופנית יכולים לחוש את המתח של הכבל שזז דרך התותבות, כך שהם יוכלו להעריך במידת מה את כוח האחיזה. תותבות מסוג מיואלקטרי יכולות להיות מותאמות באמצעות חיישנים כדי לבצע דברים כמו רישום של כוח האחיזה בקצות האצבעות, אולם מדענים עדיין לא יודעים כיצד לספק מידע מהחיישנים חזרה אל משתמשי התותבות.
המידע הזה – שנקרא “פידבק” (משוֹב) – צריך להיות מסופק באופן בעל משמעות. ישנן שתי גישות שונות שמספקות פידבק: חודרנית ובלתי חודרנית [6]. לשתיהן יש יתרונות וחסרונות.
גישה “חודרנית” משמעותה שמשתמשי התותבות צריכים לעבור ניתוח כדי לקבל את סוג הפידבק הזה. בדרך כלל חוקרים משתילים אלקטרודות סביב העצב בגדם, בתוכו או דרכו כדי לגרות ישירות את מערכות העצבים. המטרה היא לשחזר פידבק טבעי דרך גירוי עצבי ישיר. אחרי הכול, החיישנים הטבעיים ביד אנושית גם שולחים מידע אל המוח דרך אותם העצבים. אולם השיטה הזו עדיין לא צלחה.
פידבק “בלתי חודרני”, לעומת זאת, לא דורש ניתוח. דרכים שכיחות לספק פידבק בלתי חודרני הן באמצעות גירוי חשמלי של העור; ויברציה (רטט) על העור; או מכשירים שדוחפים את העור, מושכים אותו או מכווצים אותו. אולם זה בדרך כלל לא מייצר תחושה טבעית. לדוגמה, מדענים ממקמים מנוע רוטט על העור; כשהתותבת ננגעת המנוע רוטט, באופן דומה למה שקורה כשטלפון נייד מקבל הודעה. אנו קוראים לזה “החלפה חושית” מאחר שסוג אחד של מידע חושי (התחושה הטבעית של מגע) מוחלף על-ידי סוג אחר (הרטט). ההחלפה הזו אינה משהו שהמוח יבין באופן טבעי, ולכן היא צריכה להילמד. היה אידיאלי אם יכולנו, במקום זאת, לשחזר תחושות טבעיות באופן שאינו חודרני.
מסקנות
תותבות אינן נדרשות בהכרח בחיי היומיום, אולם אנשים רבים בוחרים ללבוש סוגים שונים של תותבות. כל סוגי התותבות יכולים לשחזר מראה של גוף שגרתי עם שתי ידיים, עד למידה מסוימת. תותבות אקטיביות יכולות גם לשחזר חלק מהיכולות לגעת, לתפוס ולהחזיק אובייקטים. תותבות מסוג מיואלקטרי נעשות יותר ויותר ממוקצעות ויפות למראה, אולם הן יקרות. כדי לשחזר תחושה באמצעות הידיים הרובוטיות האלה, אנו צריכים למצוא דרך לשלוח את המידע מהחיישנים למשתמש באופן בר-משמעות. חוקרים רבים עובדים על הבעיה הזו ומבצעים התקדמות אדירה, אולם עדיין אין תותבות שמשחזרות את התחושה הטבעית.
מילון מונחים
תותב (Prosthesis): ↑ החלפה של איבר גוף חסר.
מלאכותי (Artificial): ↑ משהו שיוצר על-ידי בני אדם ולא על-ידי הטבע.
הנעה גופנית (Body-powered): ↑ משהו שמוזז על-ידי גוף האדם.
הנעה חיצונית (Externally-powered): ↑ משהו שמוזז באמצעות מקור אנרגיה חיצוני, כמו למשל סוללה.
מיואלקטרי Myoelectric: ↑ משתמש באנרגיה החשמלית של שרירים (“myo” ביוונית משמעותו “שריר”, ו-“electric” משמעותו חשמל).
חיישן (Sensor): ↑ מכשיר שמגיב לגירוי פיזי (לדוגמה, לחץ) ושולח החוצה מידע לגביו.
פידבק (עבור תותבים; Feedback): ↑ מידע על התותבים שמוחזר לאדם באמצעות התותבים.
הצהרת ניגוד אינטרסים
המחברים מצהירים כי המחקר נערך בהעדר כל קשר מסחרי או פיננסי שיכול להתפרש כניגוד אינטרסים פוטנציאלי.
מקורות
[1] ↑ Ostlie, K., Lesjø, I. M., Franklin, R. J., Garfelt, B., Skjeldal, O. H., and Magnus, P. 2012. Prosthesis use in adult acquired major upper-limb amputees: patterns of wear, prosthetic skills and the actual use of prostheses in activities of daily life. Disabil. Rehabil. Assist. Technol. (2012) 7:479–93. doi: 10.3109/17483107.2011.653296
[2] ↑ Cordella, F., Ciancio, A. L., Sacchetti, R., Davalli, A., Cutti, A. G., Guglielmelli, E., et al. 2016. Literature review on needs of upper limb prosthesis users. Front. Neurosci. 10:1–14. doi: 10.3389/fnins.2016.00209
[3] ↑ Carey, S. L., Lura, D. J., and Highsmith, M. J. 2015. Differences in myoelectric and body-powered upper-limb prostheses: systematic literature review. J. Rehabil. Res. Dev. 52:247–62. doi: 10.1682/JRRD.2014.08.0192
[4] ↑ DeTOP. 2018. DeTOP Project Official Video. YouTube.com. Available online at: https://www.youtube.com/watch?v=6WQiJPexEDM (accessed April 6, 2019).
[5] ↑ Montagnani, F., Controzzi, M., and Cipriani, C. 2015. Is it finger or wrist dexterity that is missing in current hand prostheses? IEEE Trans. Neural Syst. Rehabil. Eng. 21:1–10. doi: 10.1109/TNSRE.2015.2398112
[6] ↑ Schofield, J. S., Evans, K. R., Carey, J. P., and Hebert, J. S. 2014. Applications of sensory feedback in motorized upper extremity prosthesis: a review. Expert Rev. Med. Dev. 13:1–13. doi: 10.1586/17434440.2014.929496