Abstract
Bats use sound to map their environment. They emit sounds and their brains process the received echoes. Using this sense, which is called echolocation, bats succeed at one of the hardest problems in robotics—the need to move in an unfamiliar environment and map it. Many studies have tried explaining how bats do this, and we decided to build the Robat—a robot that navigates the world and builds a map using sound. The Robat has a speaker that produces sounds, and it has two ear-like microphones, to receive echoes. The “brain” of the Robat is a computer that processes the echoes, estimates the locations of objects in the environment, and stores a constantly updated map. The Robat can avoid obstacles and even identify some objects. The Robat moves on the ground using wheels and, in the future, we aspire to make it a tiny, flying, bat-like robot.
How Do Bats Map the World?
When an animal arrives in a new environment, it needs to map the environment so that it can find its way to important places, like home and food resources. Many animals build maps of their environments on a daily basis using their senses, but for engineers, building robots that can map a new environment is one of the hardest problems [1]. In our research, we tried to mimic the ability of bats to navigate and map new environments using sound waves [2]. Bats transmit sounds (usually using their mouths) and receive the echoes that return from the environment using their ears. The bat’s brain processes the echoes and this allows the bat to: (1) move in an unknown environment without crashing into obstacles, (2) identify objects around it, and (3) map the location of objects. This unique sense is called echolocation (Figure 1A). It is worth mentioning that bats are not blind. Many bats use sight along with echolocation, although the way they combine both senses is still unclear to us. In order to better understand how bats map the world, we decided to build a robot that mimics bats’ echolocation ability. Many researchers have studied how a bat’s brain processes echoes and uses them to build a map [3]. These studies taught us a lot about bats, but building a real robot, as we did in this study, demanded that we deal with all the real problems that bats face when mapping their environments acoustically.
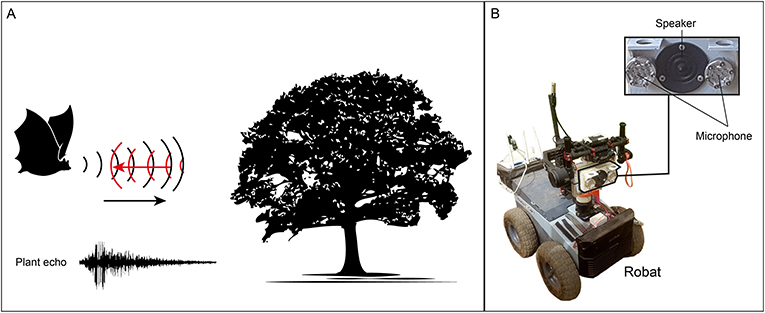
- Figure 1 - (A) Bats sense the world by emitting sounds and processing the returned echoes.
- The figure shows a bat receiving an echo from a tree. The black line at the bottom represents the returning echo. This echo is a combination of many echoes returning from the branches, the leaves and the trunk. (B) A photo of the Robat. The enlarged area shows the bat-like sensor, which includes a speaker and two microphones.
The Robat Can Navigate Around Obstacles in Its Environment
We built the Robat—a ground robot that drives on wheels and senses the world using sound waves [4]. We chose a ground robot instead of a flying robot because it is easier to control movement on the ground. When the Robat is placed in a new environment, it starts moving in a random direction. Every time it moves half a meter, the Robat emits sound using a speaker and receives echoes from the environment using two microphones (Figure 1B). The emitted sound is very similar to that of many bats. Like most bats, the Robat uses ultrasonic frequencies, meaning frequencies that humans cannot perceive. The Robat processes the echoes that bounce back using a computer that we call the Robat’s “brain.” All the sensory information the Robat receives is processed in the brain and all the commands that control its movement are sent from the brain. So, we can say that the robot is completely independent, because it moves in the world without the intervention of a human user. In the language of robotics, we call this an autonomous robot.
The first action the Robat must perform based on the echoes it receives is to identify obstacles in its way. When it identifies an obstacle in front of it, the Robat navigates around the obstacle. It turns to the right, moves for half a meter and then checks again if the obstacle is still on its left. If the Robat senses that it has not yet passed the obstacle, it moves another half meter and checks again. Once the Robat senses that it has fully passed the obstacle, it turns left and continues in its original direction of movement. If the obstacle is still not passed after three steps, the Robat will stop checking and will keep moving in its present direction, thus changing the direction of its original movement (Figure 2). One of the improvements we plan to implement in the future is a more sophisticated method for passing obstacles. For example, estimating the size of the obstacle and planning the how to get around it from the start, instead of moving a little and re-checking again and again.
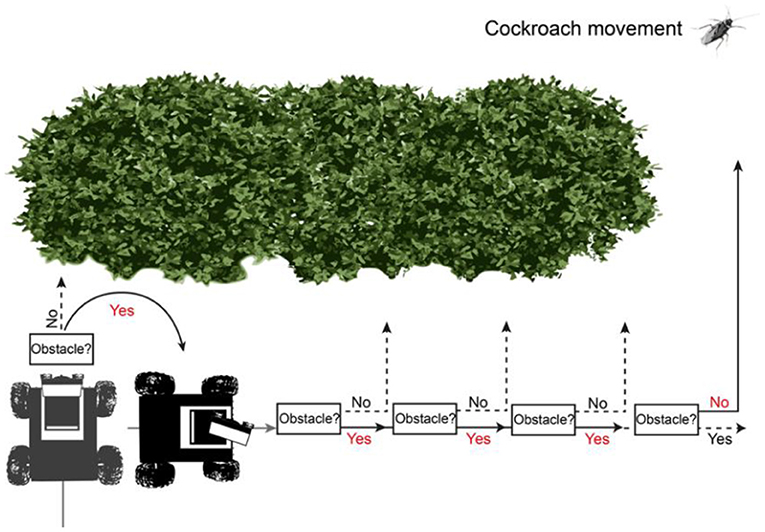
- Figure 2 - The Robat navigates around an obstacle using echolocation.
- When the Robat detects an obstacle, like the bush in this figure, the Robat’s brain directs it to turn right. The Robat will then move step-by-step, checking every half meter if the obstacle is still to its left. Once it has completely passed the obstacle, the Robat will turn left and resume its original direction.
Mapping the Environment
In addition to avoiding obstacles, the Robat uses echoes to build a map of the environment. In order to do this, the distance from the object to the Robat must be estimated. Just like a real bat, the Robat calculates the distance of objects based on the time that passes between the moment it emits the sound and the moment it receives the echo. The longer the time, the further away the object is. But, knowing the distance is not enough to create a map—it is also necessary to also calculate the direction of the object. Just like a bat, the Robat’s brain calculates direction using two “ears” (microphones). When the echo returns from an object, it is first received in the ear closer to the object and only then in the second ear. For instance, when the object is right in front of the Robat, the time difference between the ears will be zero, while if the object is on the right the sound will arrive in the right ear first and then in the left ear (Figure 3). Based on the time difference between the ears, the Robat’s brain can estimate the direction of the object.
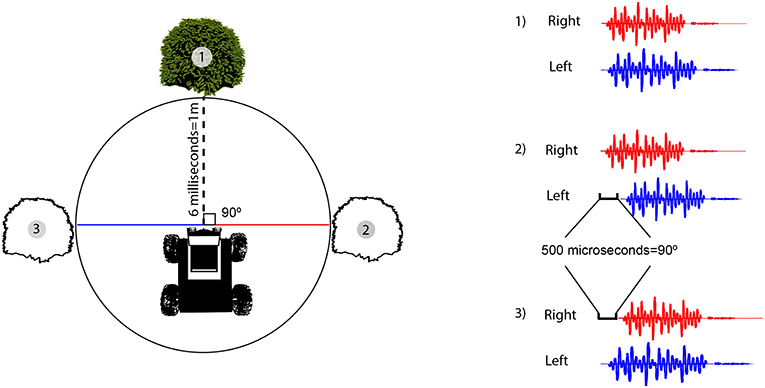
- Figure 3 - How the Robat measures direction and distance using sound.
- (Left) The distance is determined by the time it takes the sound emitted by the Robat to return as an echo. In this case, the time difference is 6 ms, which is equivalent to 1 m. Knowing the distance is not enough, since the object could be located anywhere 1 m away—for example, in the places marked 1-2-3. (Right) The direction of the object is determined by the time difference between the echoes received by both ears (the red echo returning to the right ear and the blue echo returning to the left ear). When the object is straight ahead (1) the time difference is zero. When the object is on the right (2) the time difference is 500 ms in favor of the right ear, and the opposite happens when the object is on the left (3).
In order to build an accurate map of the world, the Robat must also consider its own movement. Therefore, the Robat maps objects with respect to its starting point—the first point where the mapping started. In order to do that, the Robat constantly calculates its location with respect to the starting point, based on how it moved (Figure 3). For example, if the Robat identifies an object 1 m in front of it after it has already moved 30 m in a straight line, then this object will be placed on the map at a distance of 31 m from the starting point, on a straight line.
Object Recognition
All the processes we described so far do not allow the Robat to tell the difference between types of objects in its environment. They only explain how the Robat knows where objects are located. Real bats can identify objects based on their echoes. For example, there are bats that feed on nectar and can identify certain flowers in the forest. Also, all bats know how to identify their homes, whether in a cave or the trunk of a tree, based on echoes.
In order to provide the Robat with the ability to identify objects, we used a method called an artificial neural network, which works similarly to the way the brain works. This method belongs to a group of methods called machine learning, because this method helps the machine (computer) learn from using many examples that are shown to it. For example, if we want the computer to identify a picture of a dog, the artificial neural network will be presented with thousands of pictures of different dogs. In our case, we were satisfied with only a basic differentiation—between plants and other objects, such as stones, walls, and fences (Figure 4). In order to teach the artificial neural network, we recorded thousands of echoes of known objects. We put the Robat in front of plants and other objects and recorded their echoes. After learning, the Robat was right in its identification 70% of time, which is good but not perfect.
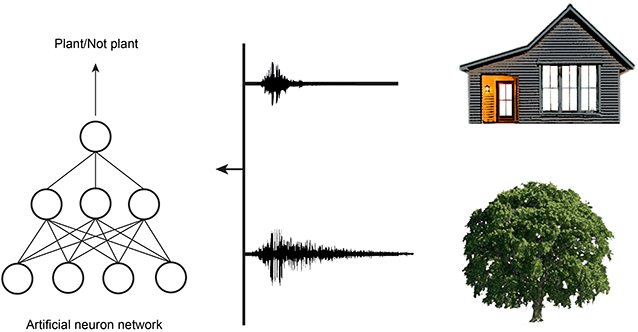
- Figure 4 - Objects with different structures produce echoes with different characteristics.
- The figure shows echoes of the wall of a building and a tree. The tree’s echo is made from many reflections from the branches and leaves while the wall’s echo is simpler. Using the artificial neural network, we managed to teach the Robat to identify plants vs. non-plant objects.
What Did We Learn Thanks to the Robat, and Why Being a Bat is Hard?
One of the goals of building a robot that mimics an animal is to help us understand the difficulties that the animal deals with. As we explained earlier, to find the direction of an object, the Robat’s brain figured out the time difference between the echoes returning to both ears. But lots of echoes return to the Robat’s ears at the same time! The Robat’s brain solved this problem by finding the most similar echo that came into both ears. Real bats solve this problem in a better way. Their ears are not simple cylinders, like the microphones. They have a complex structure and many bats can also move them (Figure 5). This complex structure helps the bat’s brain to identify similar echoes in the right and left ears. In the future, in order to improve our performance, we will add ear-like structures around the microphone to the next model of Robat.

- Figure 5 - The special outer ear structure of many bats allows them to accurately determine the location of objects.
- The Robat does not have an external ear, but we intend to include such ears in future versions. Picture: Eran Amichai.
Summary
In summary, we managed to build an autonomous robot that navigates in an unfamiliar environment without bumping into obstacles and maps the environment by emitting sounds and processing the returning echoes. In the future, we intend to improve some aspects of the Robat: (1) we would like to add ear-like receivers, (2) we would like to improve its ability to identify objects, (3) we would like to use a better algorithm to move around obstacles, and (4) we would like to make it a flying robot.
Glossary
Echolocation: ↑ Perceiving the world by emitting sounds and analyzing the returning echoes. The sense is used by bats and toothed whales but humans can also receive echoes and some blind people use a simpler form of echolocation.
Ultrasonic Frequencies: ↑ Very fast vibrations of sound that cannot be heard by the human ear.
Artificial Neural Network: ↑ A computer program that simulates brain activity because it is made from many sub-units (like brain cells) that communicate with one another. These programs are shown many examples of a certain input, such as a certain picture or sound—and they learn to recognize it and differentiate it from other inputs.
Conflict of Interest
The authors declare that the research was conducted in the absence of any commercial or financial relationships that could be construed as a potential conflict of interest.
Original Source Article
↑ Eliakim, I., Cohen, Z., Kosa, G., and Yovel, Y. 2018. A fully autonomous terrestrial bat-like acoustic robot. PLoS Comput. Biol. 14:e1006406. doi: 10.1371/journal.pcbi.1006406
References
[1] ↑ Leonard, J. J., and Durrant-Whyte, H. F. 1991. Mobile robot localization by tracking geometric beacons. IEEE Trans. Robot. Autom. 7:376–82. doi: 10.1109/70.88147
[2] ↑ Voigt, C. C., Frick, W. F., Holderied, M. W., Holland, R., Kerth, G., Mello, M. A. R., et al. 2017. Principles and patterns of bat movements: from aerodynamics to ecology. Q. Rev. Biol. 92:267–87. doi: 10.1086/693847
[3] ↑ Steckel, J., and Peremans, H. 2013. BatSLAM: simultaneous localization and mapping using biomimetic sonar. PLoS ONE 8:e54076. doi: 10.1371/journal.pone.0054076
[4] ↑ Eliakim, I., Cohen, Z., Kosa, G., and Yovel, Y. 2018. A fully autonomous terrestrial bat-like acoustic robot. PLoS Comput. Biol. 14:e1006406. doi: 10.1371/journal.pcbi.1006406