摘要
通过控制温度我们可以改变材料的物理状态,实现其固态与液态的转变。 然而,你可能没有考虑到这种转变也可以通过磁场或电场来实现。 20 世纪 50 年代,科学家们发明了可以通过施加电场或磁场改变其物理状态的智能材料— 电流变液和磁流变液。 这两类材料都是小颗粒与液体组成的悬浮体系,不同之处是电流变液中的小颗粒可在电场作用下极化,并形成沿电场方向的有序排布;磁流变液中的小颗粒可在磁场作用下磁化,并形成沿磁场方向的有序排布。 颗粒有序排列后,悬浮体系失去初始的类似液体的高流动性,而表现为类似固体的低流变性。 当电场或磁场撤去后,这两类材料又可以迅速恢复到初始的液体状态。 利用电流变液和磁流变液的这种神奇特性,科学家们已开发出智能的结构减振装置、假肢的软体机器人。 在未来,这类神奇的智能材料将具有更广阔的应用前景。
固体与液体的界限
固体、液体和气体,是我们熟悉的物质的三种状态。 当我们说“材料”一词时,你脑子里可能会想到石头、青铜、铁、钢铁等,这大概来源于我们会用人类使用的材料来命名不同的阶段,如石器时代、青铜时代、铁器时代、钢铁时代等。 上述提到的这些材料具有共同的特征:他们都是坚硬的固体。 其实,颜料、涂料、甚至水也是材料,但它们的状态和钢铁之类的固体显著不同,最明显的区别是,这些液体类的材料会流动。
那么,橡胶、塑料、玻璃、沥青、淀粉糊、果冻、布丁、牙膏之类的物质,是固体还是液体呢?如果给它们持续地施加很小的力,当观察的时间足够长时,你会发现它们会像水一样流动! 而当你撤去外力时, 它们又倾向于恢复到原来的形状,但这个恢复的过程需要一定的时间,而不像钢铁之类的固体那样瞬间恢复。
举一些生活中的例子:当我们对一根橡皮筋施加一个很小的、恒定的力,你会发现它会被逐渐的拉长,而当我们松手时,它会逐渐地回缩; 当你走进欧洲古老的教堂,你可能会发现用作窗户的玻璃呈现下厚上薄的状态,那是因为在重力持续的作用下,玻璃会向下流动,只不过它的流动不像水那样的迅速、明显。 可见,固体和液体的界限并非如我们想象的那样清晰。
1927 年,澳大利亚昆士兰大学的科学家 Thomas Parnell 为了证明沥青具有流体的特性,将沥青样本放入一个封了口的漏斗内。 三年后 Parnell 将漏斗的封口切开,他确信在重力的持续作用下,沥青会发生流动。 这是被吉尼斯世界记录评为耗时最长的实验 (图 1), 截止目前人们记录到 9 滴沥青滴落,最后一次滴落是在 2013 年7月 9 日 [1]。 2005 年 10 月,继承这项实验的 Mainstone 教授与已故的 Parnell 教授还获得“搞笑诺贝尔”物理学奖。
![图 1 - Mainstone 教授和沥青滴落实验—吉尼斯世纪记录: 耗时最长的实验 [1].](https://www.frontiersin.org/files/Articles/1479697/frym-13-1479697-HTML/image_m/figure-1.jpg)
- 图 1 - Mainstone 教授和沥青滴落实验—吉尼斯世纪记录: 耗时最长的实验 [1].
事实上,世界上的绝大多数的物质都处于“纯粹固体”和“纯粹液体”之间的状态,我们把这类物质统称为 粘弹性材料—它们既表现出钢铁一样的弹性(当钢铁受到较小的外力作用时会产生相应的形变,外力消失后又迅速恢复到原来的形状和尺寸),又表现出水一样的粘性。 有时候,人们也把粘弹性材料称为半固体或软物质。
温度,改变材料状态的有效方法
众所周知,我们可以通过温度来控制物质的状态。 最典型的例子莫过于水的相变。 当我们对固态的冰块加热时, 它会在温度超过零摄氏度时 (一个大气压下) 变为水。 另一个例子是,当我们对塑料加热时, 它会逐渐的变软;当我们对橡胶降温时, 它会逐渐的变硬、甚至变脆。 1986 年美国的挑战者号航天飞机失事,其主要的原因就是用于密封的橡胶圈在低温下失去弹性,导致了燃料的泄漏。 著名的物理学家理查德 · 费曼 (Richard Phillips Feynman) 参与了事故的调查,他用橡胶的冰水实验向公众通俗地阐述了航天飞机失事的原因 (观看视频) [2]。
其实,橡胶和塑料只是高分子材料在不同温度下呈现的不同状态。 在较低的温度下高分子材料呈现较弱的变形能力,此时的状态被称为玻璃态或塑料态;当温度逐渐升高至某一温度区间内,高分子材料会表现出较强的变形能力,此时它的性质类似于橡胶,称之为高弹态;当继续升高温度,它最终会呈现出明显的流体状态,此时称之为粘流态。
电磁流变:可以通过电场或磁场调控状态的材料
除了温度我们是否还有其它的办法改变物质的物理状态呢?
1948 年,美国国家标准局的 Jacob Rabinow 发明了一种神奇的液体 [3]。 他将磁性的颗粒与油混合配置成一种悬浮液,当对这种悬浮液施加磁场时, 磁性颗粒在沿磁场的方向排列成链状结构;当继续增大磁场时, 这些磁性颗粒甚至形成柱状结构, 此时这种液体完全失去了流动性, 表现得更像是固态, 而非液体;而当磁场撤去后, 它又恢复到原始的流体状态。 上述的过程可以通过图 2来阐述。 是的, Rabinow 通过磁场实现了对物质状态的操控!
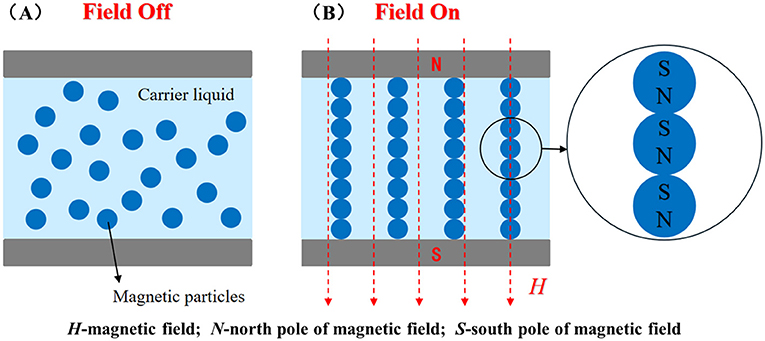
- 图 2 - 磁流变液的工作原理。 H: 磁场; N: 磁场北极; S: 磁场南极; (A) 在无磁场作用下, 粒子呈无序分布, 表现出类似流体的特性。
- (B) 当施加磁场时, 粒子自发排列成柱状结构, 材料随即呈现出固态特征 (点击这里查看中文版图片)。
严谨的科学家并不用固体或液体来简单的描述物质的状态,他们提出了一个重要的物理参数——剪切屈服强度。 理解这个概念的很好的例子是牙膏。 当我们不去挤牙膏 (没有施加剪切力时), 牙膏呈现类固体的状态;当我们用一定的力去挤牙膏时 (施加剪切力并达到剪切屈服强度时), 牙膏表现出类似流体的性质。 从这个角度看,不同状态材料的差异只在于剪切屈服强度的高低。 Rabinow 发明的这种物质的剪切屈服强度可以通过磁场迅速、可逆地控制:在不加磁场时, 其剪切屈服强底极低, 而在高磁场强度下, 其剪切屈服强度可以高达几百 kPa。 Rabinow 给这种神奇的物质取了个名字—— 磁流变液。 为了让人们直观理解磁流变液在磁场下的高剪切屈服强度,他用磁流变液制成一个演示装置。 在施加磁场时,固体化的磁流变液可以使这个装置承受一个 117 磅女孩的重量 (图 3)。
![图 3 - Rabinow 设计的磁流变液演示装置, 证明加磁场后的磁流变液可以承受一个 117 磅女孩的重量 [3] (点击这里查看中文版图片)。](https://www.frontiersin.org/files/Articles/1479697/frym-13-1479697-HTML/image_m/figure-3.jpg)
- 图 3 - Rabinow 设计的磁流变液演示装置, 证明加磁场后的磁流变液可以承受一个 117 磅女孩的重量 [3] (点击这里查看中文版图片)。
既然可以通过磁场实现对特殊悬浮体系剪切屈服强度的控制,是否也可以发明出一种液体,可以通过电场对其剪切屈服强度进行调控,从而实现从类液体到类固体的转变呢? 科学家首先想到的是用电场去“冻住”水。
水分子是典型的极性分子,这是因为水的分子结构中两个氢原子与氧原子形成的夹角约 109 度,其中的氧原子具有更强的吸电子的能力,这就导致负电荷更集中在氧原子一侧,而正电荷更集中在氢原子一侧。 当在两层电极板间对水施加电场时,水分子带正电荷的一极会朝向负极板,而带负电荷的一极则会朝向正极板。 这样一来,所有的水分子沿电场方向规则排列,整体表现出来就会如同被“ 冻住”一样。 2005 年,韩国的科学家 Heon Kang 等人在 25°C 下用 106 V/m 的电场实现了水的冻结,获得了“暖冰” [4]。 这样的转变需要借助扫描隧道显微镜 (STM), 且只能在两个小分子距离范围内实现。
是否可以更为简单、直观地看到液体被电场“冻住”的现象呢? 在 Rabinow 发明磁流变液的一年前,美国学者 W. M. Winslow 将一定量的淀粉、二氧化硅与绝缘油混合制备成悬浮体系,在 3 kV/mm 电场下获得了高达数 kPa 的剪切屈服强度,并证明撤去电场后这种材料可以迅速恢复到近似流体的状态 [4]。 人们将这种液体状态可以通过电场调控的效应称为电流变效应,或“Winslow 效应”,而具有这种效应的液体被称为电流变液 [5]。
电流变效应产生的机理是:在电场的作用下,纳米介电颗粒的表面会感生出正负电荷,导致相邻的颗粒相互吸引,形成沿电场方向排列的链状或柱状结构,从而赋予悬浮体系以较高的抗剪切能力,即表现出类似固体的性质。 不同于将水用电场冻住的现象,这种电流变效应是一种更为宏观的行为,对加电场的装置要求也极为简单。 早期的电流变液的剪切屈服强度通常在 10 kPa 以下,且存在漏电流的问题,其应用远不及磁流变液广泛。 近二十年来,学者们开发出了一系列高剪切屈服强度的新型电流变液,使电流变液的应用也日趋广泛。
电磁流变液的应用
磁流变液、电流变液的主要应用领域是结构的减振。
剧烈的振动可能会导致结构的安全性降低甚至损毁。 以地震为例,每年因地震引发的建筑倒塌数以万计,有成千上万的人因地震而丧失生命。 也许你没有经历过地震,但你一定感受过汽车行驶在不平整路面而导致的颠簸。 控制建筑结构、车辆的振动,无疑具有极其重要的意义。
在结构中设置一个专门耗散振动能量的装置可以减少主体结构的振动响应,从而避免损坏。 这类专门用来耗散振动能量的装置被称为阻尼器。 粘滞型阻尼器是通过粘性的液体给活塞的运动提供阻力来耗散能量,这在本质上和荡秋千时因为风阻而逐渐停下来的原理是类似的 [6]。 然而,普通粘滞阻尼器中液体的粘度及剪切屈服强度无法调节,并不适用于复杂多变的振动环境。 将粘滞阻尼器中的粘性液体以磁流变液或电流变液取代,并设置施加磁场或电场的装置,通过与振动监测系统及控制电路的有效配合,可以实现更为有效地减振,这类阻尼器被称为磁流变阻尼器或电流变阻尼器 [7]。 目前,磁流变阻尼器在汽车减振中的应用正受到日益广泛的关注。 在汽车行驶过程中,控制系统可以根据路面的起伏和车速实时调整磁流变阻尼器中磁流变液的粘度,从而实现更平稳的行驶,坐在车中的你将感觉不到任何颠簸(观看视频)。 近年来,电磁流变液还被用于制作人工的假肢、智能机器人的关节等[8]。 随着电磁流变液性能的不断提升,它们的应用将更加广泛。
如果你还想更加细致地了解关于磁流变液的知识,可以观看这个视频 (视频 1)。 也许你会想到其他更加重要的用途,欢迎联系我一起探讨!
术语表
智能材料 (Viscoelastic Materials): ↑
能够对外界环境变化作出响应并进行自我调节的材料。 它们通常具备传感、处理和驱动功能,并且能够根据环境变化(如温度、压力、湿度、电磁场等)改变其物理或化学性质。
粘弹性材料 (Viscosity): ↑
力学行为中同时表现出弹性和粘性特性的材料。 当受到力的作用时,粘弹性材料中的应力与应变之间的关系不仅与时间有关,还与加载速率有关。 这些材料的力学响应介于完全弹性固体和完全粘性流体之间。
剪切屈服强度 (Electrorheological Fluids): ↑
是指材料在剪切作用下从弹性状态转变为塑性流动状态所需的最小应力。 当材料受到剪切力时,如果施加的剪切应力小于剪切屈服强度,材料只会发生弹性变形,这意味着在应力去除后变形可以完全恢复。 一旦剪切应力达到或超过剪切屈服强度,材料将开始发生不可逆的塑性变形。
磁流变液 (Suspension): ↑
一种智能材料,由分散在非磁性载液中的微米级软磁性颗粒和少量稳定剂组成悬浮体系。 在外加磁场的影响下,磁流变液的流变性质发生显著变化,能够在毫秒内从自由流动的液态转变为半固态甚至固态,表现出很强的可控流变特性。
扫描隧道显微镜 (Magnetorheological Fluids): ↑
是一种利用量子隧道效应工作的表面分析仪器。 它能够在原子尺度上观察材料的表面结构,是纳米技术和表面科学中的重要工具。
kV/mm (Viscous Dampers): ↑
读作千伏每毫米,1kV/mm相当于在相距1毫米的两个平行金属板上施加1千伏的电压。
kPa (Structural Vibration Damping): ↑
读做千帕斯卡, 1kPa 的剪切屈服强度意味着,当你用一个小塑料刀平行于巨大的黄油的表面去推它的时候,每平方米的面积上要施加 1000 牛顿(大约 100 公斤,相当于一个大胖子的体重)的力,黄油就会开始像牙膏一样被挤出来,或者说它的形状开始被破坏,不能再保持原来的样子。
电流变液 (Shear Yield Strength): ↑
一类智能材料,其流变性质 (如粘度和屈服应力) 会因外加电场而发生变化。 它们通常由介电液体载体 (如硅油) 和微米级或纳米级固体颗粒 (通常为金属氧化物或带有极性分子的聚合物) 组成,这些固体颗粒在外加电场中会发生极化。
阻尼器 (Damper): ↑
用于控制或减少振动的装置,广泛应用于各种工程结构和机械系统中。 它们吸收和耗散振动能量,将动能转化为其他形式 (通常为热能),从而降低系统振动的振幅和频率。
利益冲突声明
作者声明本研究不涉及任何潜在商业或财务关系。
致谢
感谢我的女儿董书瑾。 她今年十岁,是位小科学迷,不仅喜欢读科普和科幻类的书, 还喜欢提各种怪问题、做各种奇怪的实验。 她希望作者把自己研究的电磁流变材料介绍给更多的小朋友。 为了让这篇文章适合小朋友阅读, 她给作者提了许多有建设性的意见。 特别感谢我的学生杜天翔、闫聆轩、许畅、陈欣乐等制作的科普视频。
参考文献
[1] ↑ Vernon, K. 2019. The Pitch Drop is the Longest Running Lab Experiment in History. The Vintage News. Available online at: https://www.thevintagenews.com/2019/01/15/the-pitch-drop-experiment/ (accessed January 15, 2019).
[2] ↑ Ferreira, B. 2016. The Challenger Disaster’s Minority Report. VICE Digital Publishing. Available online at: https://www.vice.com/en/article/nz7byb/the-challenger-disasters-minority-report (accessed January 28, 2016).
[3] ↑ Rabinow, J. 1948. The magnetic fluid clutch. Electr. Eng. 67:1167. doi: 10.1109/EE.1948.6444497
[4] ↑ Winslow, W. M. 1947. Method and Means for Translating Electrical Impulses into Mechanical Force. U.S. Patent No.2 417.
[5] ↑ Winslow. W. M. 1949. Induced fibration of suspensions. J. Appl. Phys. 20:1137–40. doi: 10.1063/1.1698285
[6] ↑ Konar, T., and Ghosh, A. D. 2021. Flow damping devices in tuned liquid damper for structural vibration control: a review. Arch. Comput. Method Eng. 28:2195–207. doi: 10.1007/s11831-020-09450-0
[7] ↑ Bai, X., Zhang, X., Choi, Y. T., Shou, M., Zhu, G., and Wereley, N. M. 2024. Adaptive magnetorheological fluid energy absorption systems: a review. Smart Mater. Struct. 33:033002. doi: 10.1088/1361-665X/ad278b
[8] ↑ Yang, L., Gao, C., Yang, A., and Xu, L. 2024. Design and actuation of a state transformable amorphous soft robot. Mater. Lett. 369:136719. doi: 10.1016/j.matlet.2024.136719