תַקצִיר
עטלפים משתמשים בקול כדי למפות את הסביבה שלהם. הם משדרים קולות, ובעצם צועקים חזק אבל בתדרים שבני אדם לא שומעים, ומעבדים באמצעות המוח את ההדים הנקלטים על-ידי האוזניים. באמצעות החוש הזה, המכונה אֶקוֺלוֺקַצְיָה, עטלפים מצליחים לפתור את אחת הבעיות הקשות ברובוטיקה – הצורך לנוע בסביבה בלתי מוכרת ולמפות אותה. הרבה מאוד מחקרים ניסו להסביר כיצד העטלפים ממפים את הסביבה באמצעות קול, ואנחנו החלטנו ללכת צעד אחד קדימה ולבנות את הרובוטלף – רובוט עצמאי שמנווט בעולם ובונה מפה של הסביבה באמצעות קול. לרובוטלף יש רמקול שמשמיע קולות כמו עטלף ויש לו שני מיקרופונים דמויי אוזניים, שבאמצעותם הוא קולט הדים החוזרים מהסביבה. ה’מוח’ של הרובוטלף, הוא מחשב שמעבד את ההדים, מאתר את מיקומם של העצמים שהחזירו אותם ומאחסן בזיכרון שלו מפה שמתעדכנת כל הזמן. הרובוטלף מסוגל לעקוף מכשולים ואפילו לזהות חלק מהעצמים שהוא מאתר, והכל רק על פי ההדים שלהם. הרובוטלף נע על הקרקע באמצעות גלגלים, ובעתיד אנחנו שואפים להפוך אותו לרובוט מעופף זעיר דמוי עטלף.
האזינו לפודקאסט על המאמר
כיצד ממפים עטלפים את העולם?
כשבעל חיים מגיע לסביבה חדשה, הוא צריך למפות אותה כדי שיוכל למצוא את הדרך למקומות חשובים כמו הבית או מקור המזון. בעלי חיים בונים מפה של הסביבה שלהם באופן יומיומי באמצעות חושים שונים, אבל עבור מהנדסים הבונים רובוטים, מיפוי של סביבה חדשה היא אחת הבעיות הקשות ביותר [1]. במחקר שלנו, ניסינו לחקות את יכולתם של עטלפים לנווט ולמפות סביבות חדשות באמצעות גלי קול [2]. עטלפים משדרים קולות (בד“כ באמצעות הפה) וקולטים את ההדים החוזרים מהסביבה באמצעות האוזניים. המוח של העטלף מעבד את ההדים והמידע המתקבל מאפשר לו: (1) לנוע בסביבה בלתי מוכרת מבלי להתנגש במכשולים. (2) לזהות את העצמים סביבו ו-(3) למפות את מיקומם של עצמים. החוש המיוחד הזה של העטלפים מכונה אֶקוֺלוֺקַצְיָה או איכון-הד בעברית (איור 1A). כדאי לציין שעטלפים אינם עיוורים ורבים מהם משתמשים בראייה במקביל לאקולוקציה, אם כי הדרך שבה הם משלבים את שני החושים עדיין לא ברורה לנו. כדי להבין טוב יותר איך ממפים עטלפים את העולם, החלטנו לבנות רובוט שמחקה את יכולות האקולוקציה שלהם. חוקרים רבים לפנינו ניסו להסביר באופן תאורטי כיצד מעבד מוחו של העטלף את ההדים ובונה באמצעותם מפה [3]. מחקרים אלה לימדו אותנו הרבה מאוד על העטלפים, אבל במחקרים תאורטיים ניתן להתעלם מבעיות מסוימות, בעוד שבנייה של רובוט ממשי, כפי שעשינו במחקר הזה, מחייבת התמודדות עם כל הבעיות האמיתיות שאיתן מתמודדים העטלפים.
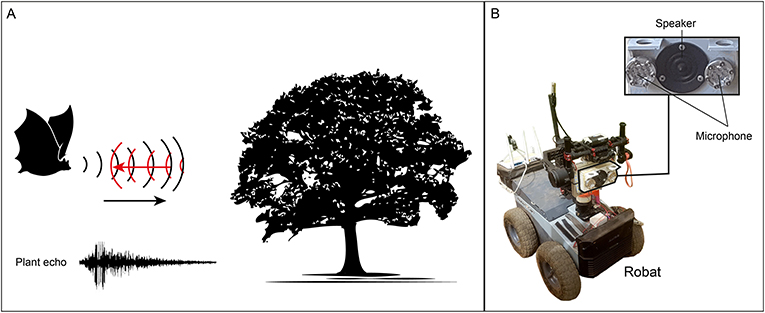
- איור 1 - A. עטלפים חשים את עולמם באמצעות השמעת קולות ועיבוד של ההדים החוזרים.
- באיור מתואר עטלף שקולט הד של עץ. הקו השחור בתחתית האיור מדגים הד שחוזר מצמח. ההד מורכב מהרבה הדים שחוזרים מהענפים, העלים והגזע. הקו השחור מייצג את תנודות המיקרופון בזמן. B. צילום של הרובוטלף. האזור המוגדל מדגיש את החיישן דמוי-העטלף שלו הכולל רמקול ושני מיקרופונים.
הרובוטלף יכול לנווט סביב מכשולים בסביבתו
בנינו את הרובוטלף - רובוט קרקעי, הנוסע על גלגלים, וחש את העולם באמצעות גלי קול [4]. בחרנו ברובוט קרקעי ולא מעופף מכיוון שקל יותר לשלוט בתנועה על הקרקע. כאשר הרובוטלף נמצא בסביבה חדשה, הוא מתחיל לנוע בכיוון אקראי. בכל פעם שהוא מתקדם חצי מטר, הרובוטלף משדר קול באמצעות רמקול שמותקן עליו וקולט הדים מהסביבה באמצעות שני מיקרופונים (איור 1B). הקול המשודר דומה מאוד לזה של עטלפים רבים. כמו מרבית העטלפים, הרובוטלף משתמש בתדרים על קוליים, כלומר כאלה שהאוזן האנושית אינה יכולה לקלוט. הרובוטלף מעבד את ההדים הנקלטים באמצעות מחשב שאנחנו נכנה ה’מוח’ שלו. כל המידע החושי שקולט הרובוטלף מעובד במוח וכל הפקודות ששולטות בתנועה שלו ניתנות על-ידי המוח. משום כך אפשר לומר שהרובוטלף הוא רובוט עצמאי לחלוטין שכן הוא נע בעולם ללא התערבות של משתמש אנושי. בשפת הרובוטיקה נהוג לומר שהוא רובוט אוטונומי.
הפעולה הראשונה שהרובוטלף צריך לבצע על סמך ההדים שהוא קולט היא לזהות מכשולים בדרכו. כאשר הוא מאתר מולו מכשול, הוא מנווט סביבו. הוא פונה ימינה, נע חצי מטר, ואז בודק האם המכשול עדיין נמצא לשמאלו. אם המכשול עדיין שם, הרובוטלף נע עוד חצי מטר ושוב בודק, ואם המכשול כבר אינו שם, הוא פונה שמאלה וממשיך בכיוון התנועה המקורי. אם לאחר שלושה צעדים המכשול עדיין לא נעקף, הרובוטלף יפסיק לבדוק וימשיך בתנועה בכיוונו הנוכחי, כלומר ישנה את כיוון התנועה המקורי שלו (איור 2). השיטה הפשוטה הזו לעקוף מכשול מכונה לעיתים תנועת ג’וק כי יש חרקים שמשתמשים בה. אחד השיפורים שבכוונתנו לעשות בעתיד, היא להנהיג שיטה מתוחכמת יותר לעקיפת מכשולים. למשל, להעריך את גודל המכשול ברגע שמאתרים אותו ולתכנן לפיכך את המסלול מלכתחילה במקום לנוע מעט ולבדוק שוב ושוב.
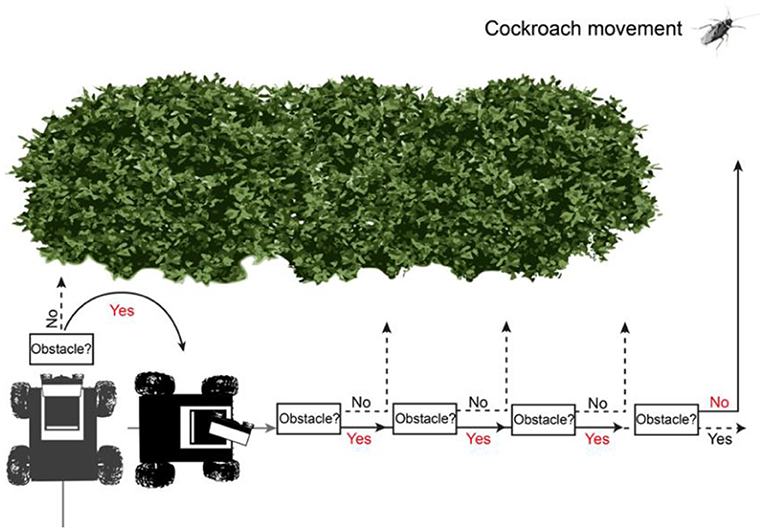
- איור 2 - האלגוריתם לעקיפת מכשול מנחה את הרובוטלף לפנות ימינה כאשר הוא מגלה מכשול לפניו ואז להתקדם צעד ולבדוק האם המכשול עדיין נמצא משמאל.
בניית מפה
בנוסף להימנעות ממכשולים, הרובוטלף משתמש בהדים בשביל לבנות מפה של הסביבה. כדי למפות מקום של עצם צריך להעריך את המרחק. בדיוק כמו עטלף אמיתי, הרובוטלף מחשב את המרחק של עצמים על פי הזמן החולף מרגע שהוא משדר קול ועד שהוא קולט הד. ככל שהזמן הזה ארוך יותר, כך העצם מרוחק יותר. כדי לחשב במדויק את המרחק צריך לדעת את מהירות התנועה של הקול. חישבו על מכונית שנוסעת במהירות של עשרה מטרים בשנייה: אם המכונית נסעה במשך שניה אחת, ברור שהיא התקדמה עשרה מטרים. באופן דומה, המוח של העטלף יכול לאמוד את המרחק של העצם באמצעות ידיעת מהירות הקול וחישוב הזמן שעבר מרגע השידור ועד רגע הקליטה. אך ידיעת המרחק לא מספיקה. למשל, אם גילינו שהעצם מרוחק מהרובוטלף עשרה מטרים, לא ניתן לדעת האם הוא ממוקם עשרה מטרים מימין או משמאל. לכן, כדי לדעת היכן נמצא העצם, צריך גם לחשב את הכיוון שלו. בדומה למערכת השמיעה של עטלפים ויונקים אחרים, המוח של הרובוטלף מחשב את הכיוון באמצעות שימוש בשתי אוזניים (שני מיקרופונים). כאשר הד מוחזר מעצם, הוא בד”כ לא מגיע לשתי האוזניים באותו הזמן. הוא קודם נקלט באוזן הקרובה יותר אל העצם ורק אחר-כך באוזן השנייה. למשל כאשר העצם נמצא ממש מול הרובוטלף (זווית אפס), הפרש הזמנים יהיה אפס ואילו כאשר העצם נמצא ממש בצד ימין (זווית תשעים מעלות), הקול יגיע קודם לימין ורק אח"כ לשמאל והפרש הזמנים יהיה מקסימלי (איור 3). על פי הפרש הזמנים בין האוזניים, המוח של העטלף וגם של הרובוטלף יכול להעריך את הכיוון של העצם. לרובוט אין קושי להבחין בין קדימה ואחורה מכיוון שגלי הקול שהוא משדר אינם מתפשטים אחורה, כלומר למעשה הוא אינו ’רואה’ מאחור.
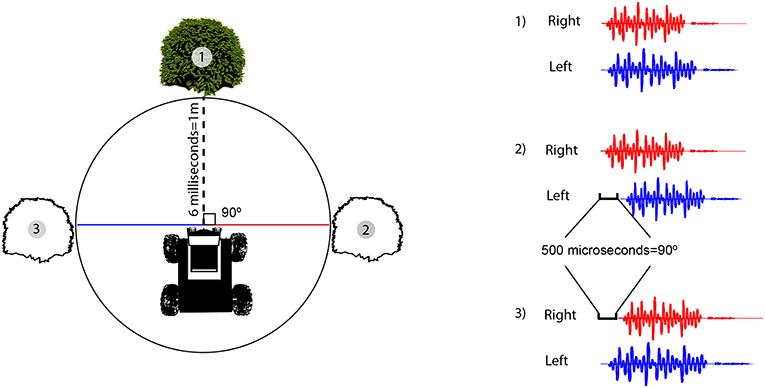
- איור 3 - האיור מדגים כיצד מודד הרובוטלף כיוון ומרחק באמצעות קול.
- בצד שמאל - המרחק נקבע על פי הזמן העובר מרגע השידור ועד הקליטה, כשבמקרה הזה הפרש הזמנים הוא 6 מילישניות ושקול למרחק של מטר. ידיעת המרחק אינה מספיקה מכיוון שהעצם יכול להימצא בכל מקום במרחק של מטר – למשל במקומות המסומנים כ-3-2-1 שבאיור. בצד ימין - כדי למקם את העצם – צריך לדעת את הכיוון שלו והכיוון נקבע על פי הפרש הזמנים בין ההדים הנקלטים על-ידי שתי האוזניים (ההד האדום שחוזר לאוזן ימין והכחול שחוזר לאוזן שמאל). כאשר העצם נמצא ישר מלפנים (1) הפרש הזמנים הוא אפס. כאשר העצם נמצא מימין (2) ההפרש הוא 500 מיקרו-שניות לטובת אוזן ימין וההפך קורה כאשר העצם משמאל (3).
הסברנו עכשיו כיצד יודע הרובוטלף איפה נמצא העצם ביחס למיקום הנוכחי שלו, אבל כדי לבנות מפה של העולם, הרובוטלף חייב גם להתחשב בתנועה שלו עצמו. לפיכך, הרובוטלף ממקם את העצמים על המפה שבמוחו ביחס לנקודת המוצא שלו – הנקודה הראשונה שבה התחיל המיפוי. כדי לעשות זאת, הרובוטלף כל הזמן מחשב את המיקום שלו ביחס לנקודת המוצא על פי התנועה שעשה (איור 3). כלומר, אם ברגע מסוים הרובוטלף מאתר עצם שנמצא מטר מלפניו, ואם עד לאותו הרגע, הרובוטלף נע 30 מטר בקו ישר, אז העצם הזה ימוקם על המפה שבזיכרון שלו במרחק של 31 מטרים מנקודת המוצא, בקו ישר בדיוק.
זיהוי עצמים
כל התהליכים שתיארנו עד כה לא מאפשרים לרובוטלף להבחין בין עצמים מסוגים שונים. הסברנו רק איך הוא יודע איפה יש עצם ואיפה אין. למעשה אפשר לומר שהמפה שתיארנו עד כה מבחינה רק בין השבילים הפתוחים בסביבה לבין העצמים סביבם. עטלפים אמיתיים מסוגלים לזהות עצמים על פי ההדים שלהם. ישנם למשל עטלפים שניזונים מצוף ומזהים פרחים מסוימים ביער. ישנם עטלפים שמבחינים בין צמחים שונים, וכל העטלפים יודעים לזהות את הבית שלהם בין אם הוא מערה או גזע של עץ על פי ההד.
כדי להקנות לרובוטלף יכולת זיהוי, השתמשנו בשיטה המכונה ’רשת נוירונים מלאכותית’ משום שהיא מחקה את פעילותה של רשת עצבים במוח. השיטה הזו שייכת לקבוצה של שיטות מסוג ’למידת מכונה’ משום שכמו המכונה, או המחשב, השיטות האלה לומדות באמצעות דוגמאות רבות שמציגים להן. למשל, אם רוצים לזהות תמונה של כלב, צריך להציג לרשת הנוירונים אלפי תמונות של כלבים שונים. במקרה שלנו, המוח של הרובוטלף למד להבחין בין עצמים על פי ההדים שלהם. הסתפקנו בהבחנה בסיסית בלבד – בין צמחים לבין עצמים שאינם צמחים, כמו אבנים, קירות וגדרות (איור 4). הבחנה בסיסית כזו יכולה לסייע לרובוטלף להכריע אם הוא יכול לעבור דרך מכשול, למשל אם מדובר בצמח, או אם עליו לעבור סביבו, למשל אם מדובר בקיר. כדי ללמד את רשת הנוירונים המלאכותית, הקלטנו אלפי הדים של עצמים ידועים – כלומר הצבנו את הרובוטלף מול צמחים והקלטנו את ההדים שלהם והצבנו אותו מול עצמים אחרים והקלטנו את ההדים שלהם. הרובוטלף הצליח להבחין בין צמחים לבין עצמים אחרים. הוא עשה זאת טוב בהרבה מניחוש מקרי, אבל לא באופן מושלם. הרובוטלף צדק בזיהוי ב-70% מהמקרים, הרבה יותר מאשר באופן מקרי (שבו ההצלחה היתה 50%), אבל הרבה פחות מ-100%. מעניין היה לראות שעיקר הטעויות של הרובוטלף נעשו בזיהוי של עצמים כמו גדרות. לגדר יש הרבה חלקים גליליים וצרים שהופכים את ההד שלה דומה להד של צמח.
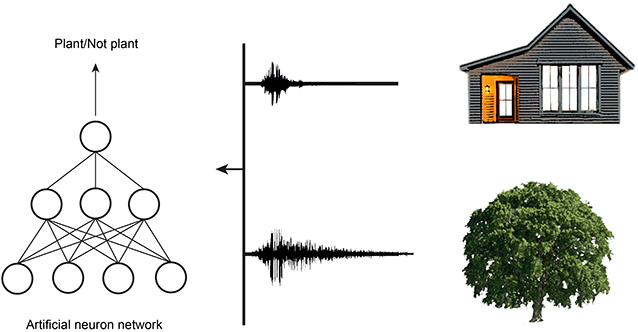
- איור 4 - עצמים בעלי מבנה שונה מייצרים הדים בעלי מאפיינים שונים.
- באיור מודגמים הדים של קיר (של מבנה) ושל עץ. ההד של העץ מורכב מהדים רבים החוזרים מהענפים והעלים. באמצעות רשת נוירונים מלאכותית הצלחנו לסווג את ההדים שקלט הרובוטלף להדים של צמחים לעומת הדים של עצמים שאינם צמחים.
מה למדנו בזכות הרובוטלף, או מדוע קשה להיות עטלף?
אחת המטרות של בניית רובוט שמחקה בעל חיים, היא הבנה של מידת הקושי של המשימות השונות שבעל החיים מתמודד איתן. במהלך בניית הרובוטלף, אחת הבעיות הקשות ביותר, היתה הצורך לזהות את ההד החוזר מאותו עצם בשתי האוזניים. כפי שהסברנו קודם, הרובוטלף מעריך את הכיוון של עצם כלשהו על פי הפרשי הזמנים בין ההדים החוזרים לשתי האוזניים. הבעיה היא שאלומת הקול של הרובוטלף רחבה. כאשר הוא משדר קול, גל הקול מתקדם קדימה, אבל גם לצדדים. התוצאה היא שהדים רבים חוזרים אל המיקרופונים ולכן, עבור כל הד שהרובוטלף קולט באוזן ימין, הוא צריך לבחון את כל ההדים שנקלטו באוזן שמאל ולהחליט מיהו ההד המתאים - ההד שחזר מאותו עצם. המוח של הרובוטלף פתר את הבעיה הזו על-ידי מדידת דמיון בין הדים ובחירת ההד הדומה ביותר. עטלפים אמיתיים פותרים את הבעיה הזו בדרך טובה יותר. האוזניים שלהם אינן בעלות מבנה גלילי פשוט כמו מיקרופון. יש להן מבנה מרחבי מורכב ועטלפים רבים גם יכולים להזיז אותן (איור 5). המבנה המורכב הזה גורם לגלי קול להתנגש זה בזה באוזן ולשבש אחד את השני. ההפרעות האלה גורמות להדים שחוזרים ממיקומים דומים לקבל חתימה דומה – כלומר להיות דומים יותר, וזה מאפשר למוח של העטלף האמיתי לזהות הדים מתאימים זה לזה באוזן ימין ובאוזן שמאל. כדי לשפר את הביצועים שלנו, לדגם הבא של הרובוטלף, נוסיף מבנים מורכבים סביב המיקרופונים. אגב, גם המבנים המוזרים שבאוזן שלנו, בני האדם, נועדו בין היתר לאותה מטרה.

- איור 5 - עטלף מהמין לילן ממחיש את צורות האוזניים החיצוניות המיוחדות של עטלפים רבים המאפשרות להם לקבוע מיקומים של עצמים במדויק.
- לרובוטלף אין אוזן חיצונית, אך בגרסא העתידית שלו אנחנו מתכוונים לכלול אוזן כזו. צילום: ערן עמיחי.
לסיכום,
הצלחנו לבנות רובוט עצמאי שמנווט בסביבה בלתי מוכרת בלי להתנגש במכשולים וממפה את הסביבה באמצעות שידור קולות ועיבוד של הדים. בעתיד, בכוונתנו לשפר היבטים שונים של הרובוטלף: (1) נרצה להוסיף לו מקלטים דמויי אוזן. (2) נרצה לשפר את היכולת שלו לזהות עצמים. (3) נרצה להשמיש שיטה חכמה יותר לעקוף מכשולים מאשר תנועת ג’וק. (4) נרצה להפוך אותו לרובוט מעופף.
מילון מונחים
אקולוקציה (איכון-הד): ↑ חוש שמאפשר תפישה של העולם באמצעות שידור קולות וקליטת ההדים החוזרים. החוש נמצא בשימוש של עטלפים ולוויתני שיניים, אך גם בני אדם מסוגלים לקלוט הדים ויש אנשים עיוורים שמשתמשים בצורה בסיסית של אקולוקציה)
תדרים על קוליים: ↑ התדר של גל קול נקבע על פי מספר הפעמים שלחץ האוויר משתנה בשנייה (מספר התנודות). תדרים על קוליים מוגדרים כתדרים שבהם לחץ האויר משתנה יותר מ-20 אלף פעמים בשנייה משום שהאוזן האנושית לא מסוגלת לשמוע אותם (הם נמצאים מעל תחום הקול הנשמע). בפועל רוב בני האדם לא מסוגלים לשמוע כבר מתדרים של 14-16 אלף תנודות בשנייה.
רשת נוירונים מלאכותית: ↑ תכנת מחשב המדמה באופן חלקי את פעילות המוח משום שהיא מורכבת מהרבה תתי-יחידות (דמויי נוירונים) שמתקשרים זה עם זה. תכנות אלה מתמחות בלמידה מפוקחת – כאשר מראים להן הרבה דוגמאות של קלט כלשהו – תמונה מסוימת או קול מסוים – הן לומדות לזהות אותו ולהבחין בינו לבין קלטים אחרים.
הצהרת ניגוד אינטרסים
המחברים מצהירים כי המחקר נערך בהעדר כל קשר מסחרי או פיננסי שיכול להתפרש כניגוד אינטרסים פוטנציאלי.
מאמר המקור
↑ Eliakim, I., Cohen, Z., Kosa, G., and Yovel, Y. 2018. A fully autonomous terrestrial bat-like acoustic robot. PLoS Comput. Biol. 14:e1006406. doi: 10.1371/journal.pcbi.1006406
מקורות
[1] ↑ Leonard JJ, Durrant-Whyte HF. Mobile robot localization by tracking geometric beacons. IEEE Trans. Robot. Autom. 1991;7(3):376–382.
[2] ↑ Voigt CC, Frick WF, Holderied MW, Holland R, Kerth G, Mello MAR, et al. Principles and Patterns of Bat Movements: From Aerodynamics to Ecology. Q. Rev. Biol. 2017;92(3):267–287.
[3] ↑ Steckel J, Peremans H. BatSLAM: Simultaneous localization and mapping using biomimetic sonar. PloS ONE. 2013;8(1):e54076.
[4] ↑ Eliakim I, Cohen Z, Kosa G, Yovel Y (2018) A fully autonomous terrestrial bat-like acoustic robot. PLOS Comput. Biol. 14(9): e1006406